





龙门桁架机械手使用注意事项
1)先排出故障然后调试
对于调试和故障并存的电气设备,应该先排除故障,然后再进行调试,调试须在电气线路正常的情况下进行。
2)先外面后里面
应先检查设备表面有无明显裂痕、缺损,了解其维修史、使用年限等,然后再对机器内部进行检查。拆前应排除周边的故障因素,确定为机内故障后才能拆卸,否则,盲目拆卸,可能将设备越修越坏,造成不必要的损失。
3)先机械部分后电气部分
只有在确定机械零件无故障后,再进行电气方面的检查。检查电路故障时,应利用检测仪器寻找故障部位,确认无接触不良故障后,再有针对性地查看线路与机械的运作关系,以免误判。
4)电器部件更换,先外围后内部
先不要急于更换损坏的桁架机器人电气部件,在确认外围设备电路正常时,再考虑更换损坏的电气部件。
5)日常检修,先直流后交流
检修时,须先检查直流回路静态工作点,再检查交流回路动态工作点。
6)出现故障,先动口再动手对于有故障的桁架上下料电气设备,不应急于动手,应先询问产生故障的前后经过及故障现象。对于生疏的设备,还应先熟悉电路原理和结构特点,遵守相应规则。拆卸前要充分熟悉
每个电气部件的功能、位置、连接方式以及与周围其他器件的关系,在没有组装图的情况下,应一边拆卸,一边画草图,并记上标记。
7)先静态后动态
在桁架机械手未通电时,判断电气设备按钮、接触器、热继电器以及保险丝的好坏,从而判定故障的所在。通电试验,听其声、测参数、判断故障,终进行维修。如在电动机缺相时,若测量三相电压值无法判别时,就应该听其声,单测每相对地电压,方可判断哪一相缺损。
8)维护保养,先清洁后维修
对于污染较重的电气设备,先对其按钮、接线点、接触点进行清洁,检查外部控制键是否失灵。许多故障都是由脏污及导电尘块引起的,一经清洁故障往往会排除。
9)先电源后设备日常桁架上下料电源部分的故障率在整个故障设备中占的比例很高,所以先检修电源往往可以事半功倍。
龙门桁架机械手需及时润滑
桁架机械手的滚珠丝杆和直线导轨都须在使用了一定的时间以后,及时加注优良的锂基润滑脂,保持润滑而可以减少因为干燥摩擦产生的影响。但是如果丝杆和导轨在出厂之前已经加注过润滑脂,则使用之后无需再加注。
龙门桁架机械手保养手册
1、检查同步带松紧度是否恰当;检查气管、气缸是否有漏气现象;检查缓冲垫是否有松脱现象;检查各部件的螺丝是否松动,加以紧固;
2、清洗过滤减压阀、消音器;
3、检查负压传感器是否正常(没吸到产品是否报警);
4、夹具检测磁环开关是否正常(没夹到产品或料把是否报警);
5、检查所有运动部位的螺栓有无锁紧是否松动;
6、确定管线有无破裂或电线连接是否松动松脱;
7、擦拭桁架机械手手臂上的灰尘、油,确保机械手清洁;
8、擦拭桁架机械手滑轨、滑块油迹灰尘,添加新的润滑油;检查电控箱内部:清扫灰尘,检查接线端子、继电器插头、电路板上的电子元器件是否有松动松脱。
龙门桁架机械手应用于生产制造之后能为企业带来很多好处,应用之后车间内设备布置更为集中紧凑,单位厂方面积的产出提高近一倍,可为企业节省工作人员,提高生产2-3倍,而且还能够提高生产效率的同时不受人员因素影响,充分利用设备。另外,桁架机械手还具有一定的柔性,能减少更换产品的生产辅助时间,从而缩短交货期。而且桁架机械手还能改善作业环境,减少隐患,为企业实现人性化生产与管理。
龙门桁架机械手是一种模拟人手操作的一种自动控制、可重复编程、多功能、多自由度的操作机(固定式的或是移动式的),用于搬运资料、工件、操持工具或检测设备,完成各种作业的自动化设备。
龙门桁架机械手一般用作机床或其他机器的附加设备,如在自动机床或自动出产线上装卸和传递工件,在加工中心中更换刀具等,一般没有立的控制设备。使用上下料机械手能够从事单调、重复或繁重的体力劳动,实现出产的机械化和自动化,在有害环境下的手工操作,提高劳动条件,提升人身安全,因此广泛使用于机械制造、冶金、电子、轻工和原子能等部分。
龙门桁架机械手是一种建立在直角X,Y,Z[1]三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。其控制核心通过工业控制器(如:PLC,运动控制,单片机等)实现。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
龙门桁架机械手是一种建立在直角X,Y,Z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。
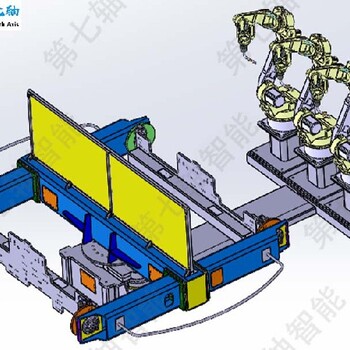
龙门桁架机械手由结构框架、X轴组件、Y轴组件、Z轴组件、工装夹具以及控制柜六部分组成。各个轴的组件通常由结构件、导向件、传动件、传感器检测元件以及机械限位组件等五部分组成。
结构件
通常由铝型材或方管,矩形管,槽钢,工字钢等结构组成,其作用是作为导向件、传动件等组件的安装底座,同时也是机械手负载的主要承担者。
导向件
常用有直线导轨,V型滚轮导轨,U型滚轮导轨,方型导轨以及燕尾槽等常用导向结构,其具体运用需根据实际使用工况以及定位精度决定。
传动件
通常有电动,气动,液压三种类型,其中电动有齿轮齿条结构,滚珠丝杠结构,同步带传动,链条传统以及钢丝绳传动等。
传感器检测元件
通常两端采用行程开关作为电限位,当移动组件移动至两端限位开关处时,需要对机构进行锁死,防止其超程;此外还有原点传感器以及位置反馈传感器。
机械限位组件
其作用是在电限位行程之外的刚性限位,俗称死限位。
龙门桁架机械手对用户来说,可以很快进行产品结构的调整在实践中,桁架机械手对设备几乎可以在工业生产中的各行各业被大量广泛应用,具有操作方便,,工件质量高等优点,同时将操作工人从繁重,单调的工作环境中解救出来,越来越受到生产厂家的青睐,拥有此套生产线势必能凸显企业生产实力,提高市场的竞争力,是工业生产加工的必然趋势。
桁架机械手构成:
桁架机械手设备主要由工业机械手、产品工件自动识别系统、自动启动装置、、自动搬运系统等周边设配构成,根据系统集成,能够实现每台数控车床、生产加工单元、生产流水线和柔性加工单元的机械加工自动化技术。具备定位准确、工作节奏可调式、工作空间大、特性、运转稳定可靠、检修便捷等优点。
桁架机械手功效:
桁架机械手上下料,可节省人力成本。
人工取产品有夹伤手的风险,应用机械手能够确保工厂安全生产加工。
机械臂选用全自动生产工艺,全部工艺流程工作均为自动上下料,生产管理细节清洗、就可以提高工厂生产效率。
桁架机械手可以提升工作效率,降低劳动伤害,完成更安全地作业环境,可提供定制服务,帮公司节约大量费用。

广西生产焊接变位机加工机器人焊接变位机厂家
面议
产品名:焊接变位机

徐州生产焊接变位机尺寸机器人焊接变位机厂家
面议
产品名:焊接变位机

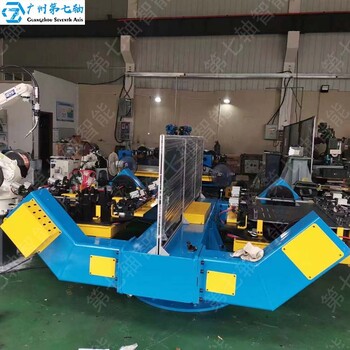
珠海国产变位机厂家机器人变位机自动焊接翻转台
面议
产品名:变位机

上海供应龙门桁架机械手,桁架机械手
面议
产品名:龙门桁架机械手,桁架机械手,桁架机器人,龙门桁架
工业焊接变位机操作流程,变位机厂家
面议
产品名:焊接变位机
黄浦工业焊接变位机,变位机
面议
产品名:焊接变位机,焊接辅助设备变位机,焊接翻转变位机,伺服变位机,变位机厂家

达州定制第七轴机器人龙门桁架服务周到,机器人龙门机械手
面议
产品名:机器人龙门桁架,龙门式桁架,机器人 龙门机械手,重载机器人桁架

广州智能第七轴机器人单臂桁架,机器人桁架
面议
产品名:机器人单臂桁架,机器人桁架,机器人桁架机械手,智能机器人桁架