灵活机械手适配多种车型
机械手移动距离优化,满足各种车型,平板车、低栏车、高栏车。
停车引导及位置偏差自适应
当车辆出现水平偏差,装车机通过码垛小车自适应行走偏移量,弥补停车位的偏差。
采用3D视觉定位抓取,码垛精细,单机械臂码垛效率每小时可达1000件。
可视化
行业的软硬件产品,码垛流程可视化管理,保障装车系统安全运作。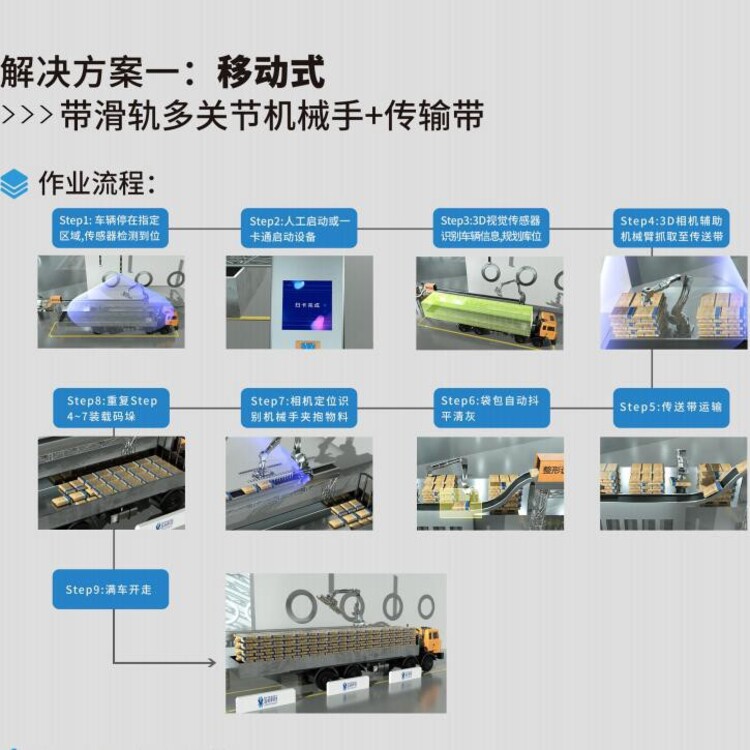
解决方案一:移动式
>>>带滑轨多关节机械手+传输带
作业流程:
Step1:车辆停在区域,传感器检测到位
Step2:人工启动或一卡通启动设备
Step3:3D视觉传感器识别车辆信息,规划库位
Step4:3D相机辅助机械臂抓取至传送带
Step 5:传送带运输
Step6:袋包自动抖平清灰
Step7:相机定位识别机械手夹抱物料
Step8:重复Step4~7装载码垛
Step9:满车开走
解决方案二:固定式>>>货车停靠装车
Step1:车辆停好,传感器检测到位
Step2:人工启动或一卡通启动设备
Step3:3D视觉传感器识别车辆信息,规划库位
Step 4:机械手智能规划抓取
Step5:根据库位规划整齐码放货物
Step6:重复Step4~5快速码垛装车
Step7:满车开走
车辆激光扫描检测成像
车辆特征识别与提取
各类车型样式的特征识别,并建模,完成特征的提取
车辆规格尺寸检测
主要包括车辆的长、宽、高、各类特征的尺寸规格
检测系统自检
通过标准物体的识别,进行标准比对,确保检测运行可靠
产品适用性
优势
六轴机器人速度较快,对于平板车和低栏车,此方案效率较高
劣势
受限于机械手作业半径,对于高栏车,存在无法码垛的问题,实际作业中存在栏板离地高度3米多,栏板自身高度近2m的情况










