关键词 |
县停车场车牌识别系统,区停车场车牌识别系统,区停车场车牌识别系统,县停车场车牌识别系统 |
面向地区 |
全国 |
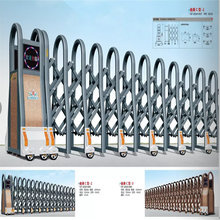
车牌识别系统针对这些基础的算法有了更进一步,深层次的运用。解决了在复杂背景的图象中如何准确而迅速地定位分割牌照区域一体化摄像机专指可自动聚焦、镜头内建的摄像机。与传统摄像机相比,一体化摄像机体积小巧、美观,安装、使用方便,监控范围广、等优点。而车牌识别一体机则是在一体化摄像机上加入车牌识别的功能,车牌识别一体摄像机针对停车场行业,推出的基于嵌入式的智能高清车牌识别一体机产品,集车牌识别、摄像、前端储存、补光等一体,基于车牌自动曝光控制算法,成像。具有性能、多功能、高适应性、强稳定性等特点。
支持牌照类型:普通蓝牌、黑牌、黄牌、双层黄牌、警车车牌、新式车牌、新式军牌、使馆车牌、港澳进出大陆车牌。折叠编辑本段核心特色优化的嵌入式车牌识别算法:综合识别率99.58%;的成像自动控制:自动跟踪光线变化、有效抑制顺光和逆光;夜间抑制汽车大灯;补光灯基于图像分析算法进行控制,避免了传统基于光敏电阻补光的不稳定性;可脱机运行:前置数据存储功能;无车牌车辆智能处理:多触发机制无车牌(或严重污损等)车辆的正常通行管理;
车牌识别的优势在于可以把卡和车对应起来,使管理提高一个档次,卡和车的对应的优点在于长租卡须和车配合使用,杜绝一卡多车使用的漏洞,提高物业管理的效益;同时自动比对进出车辆,防止偷盗事件的发生。升级后的摄像系统可以采集更清晰的图片,作为档案保存,可以为一些纠纷提供有力的证据。
自然环境下,汽车图像背景复杂、光照不均匀,如何在自然背景中准确地确定牌照区域是整个识别过程的关键。对采集到的视频图像进行大范围相关搜索,找到符合汽车牌照特征的若干区域作为候选区,然后对这些侯选区域做进一步分析、评判,后选定一个佳的区域作为牌照区域,并将其从图像中分离出来。
红外光路线是指利用车牌反光和红外光的光学特性,用红外摄像机采集车辆灰度图像,由于红外特性,车辆图像上几乎只能看见车牌,然后用黑白图像处理方法识别车牌。950nm的红外照明装置可抓拍到很好的反光车牌照图像。因红外光是不可见光,它不会对驾驶员产生视觉影响。另外,红外照明装置提供的是不变的光,所抓拍的图像都是一样的,不论是在一天中明亮的时候,还是在一天中暗的时候。的例外是在白天,有时会看到一些牌照周围的细节,这是因为晴朗天气时太阳光的外光波的影响。采用红外灯的缺点就是所捕获的车牌照图像不是彩色的,不能获取整车图像,并且严重依赖车牌反光材料。
人工神经网络技术,计算机及相关技术发达的一些国家开始探讨用人工神经网络技术解决车牌自动识别问题,例如1994年M.M.M.FANHY等就成功地运用了BAM神经网络方法对车牌上的字符进行自动识别,BAM神经网络是由相同神经元构成的双向联想式单层网络,每一个字符模板对应着个BAM矩阵,通过与车牌上的字符比较,识别出正确的车牌号码。
传统模式识别技术。传统模式识别技术指结构特征法,统计特征法等。90年代,由于计算机视觉技术的发展,开始出现汽车牌照识别的系统化研究。1990年AS.Johnson等运用计算机视觉技术和图像处理技术实现了车辆牌照的自动识别系统。该系统分为图像分割、特征提取和模板构造、字符识别等三个部分。利用不同闽值对应的直方图不同,经过大量统计实验确定出车牌位置的图像直方图的闽值范围,从而根据特定闽值对应的直方图分割出车牌,再利用预先设置的标准字符模板进行模式匹配识别出字符。
为了测试一个车牌识别系统识别率,需要将该系统安装在一个实际应用环境中,全天候运行24小时以上,采集至少1000辆自然车流通行时的车牌照进行识别,并且需要将车辆牌照图像和识别结果存储下来,以便调取查看。然后,还需要得到实际通过的车辆图像以及正确的人工识别结果。之后便可以统计出以下识别率:
几乎每家都宣称拥有高辨识率,但为了避免事后因为双方对产品认知有差异,而将运作不良的责任互相推托,用户在采购车牌辨识系统时,不妨要求实地测试,而且测试时间好超过两个礼拜,比较能判断辨识结果是否“言过其实”。因为多变的环境,两个礼拜应该可以对于场域可能影响辨识率的情形,大约掌握了八成,如果只是测一天、甚至几个小时,是无法了解的。