关键词 |
螺丝螺母五金立体仓库,无锡立体仓库,电缆立体仓库,工具立体仓库 |
面向地区 |
全国 |
智能物流是一种的物联网技术现已广泛应用于工业上的分拣、包装、装卸 、搬运、装配等环节,随着机器人技术的快速发展,用机器人来替代人进行工作,不但可以节约人力成本和减少搬运不当对人造成的伤害,而且可以提高工作效率和质量。
本文创新性地集成了自动化立体仓库、AGV、复合机器人及双臂机器人等智能设备,设计了一套智能机器人仓储物流系统,同时开发了总控调度软件,实现了各设备的稳定立有序运行。针对AGV定位不准确的问题,本文提出一种二维码视觉定位方法,从而提高了仓储物流系统的稳定性。

图1为本文设计的智能机器人仓储物流系统总体方案,其集成了自动化立体仓库、AGV、机器人、视觉传感器、激取光料传感器等,由机器人完成物料的拾取、摆放、搬运和分捡,视觉系统完成对物料的形状、位置和颜色识别,传感器完成移动机器人的定位和避障等,该系统实现了齿轮箱的装配和拆解工作,其适用性广,衍生能力强。设计齿轮箱装配工艺流程如图2所示。
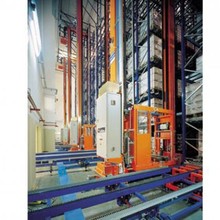
设计开发自动化立体仓库其管理系统具有货物入库、货物出库、入/出库人工修正、库存盘点、设备状态查询及设备故障记录等功能,可以自动记录设备故障信息,包括设备编码、故障时间、故障类别、故障说明等,在故障排除后由操作员在该记录中填写排除时间信息,并且可以按照设备编码、故障类别等进行设备故障记录查询,查询结果以列表形式显示在计算机屏幕上,并可以打印输出。
平台式 AGV
平台式AGV能够实现物品的自动化可靠运输及自动投送。其搭载激光传感器、超声波传感器。基于激光SLAM的定位导航算法,结合超声波传感器,实现自主行走及自主避障。其控制台可以集中调度、监控、管理 AGV 系统的运行状态活动。

叉车 AGV叉车AGV具有激光导引系统、控制台和调度管理系统、在线自动充电系统、通讯系统及安全系统等。控制台和调度管理系统是AGV系统的调度管理中心,负责与上位机交换信息,生成AGV的运行任务,并将指令下发给AGV完成相应的任务。
综合考虑智能机器人仓储物流系统工作流程,机器人的转弯半径、工作空间、场地等多方面约束,进行智能机器人仓储物流系统布局设计,其布局如图7所示,图中虚线表示叉车 AGV 的运行路线,粗实线表示复合机器人的运行路线,细实线为平台式AGV的运行路线,两台平台式AGV交替工作。复合机器人与叉车AGV在转接台处完成取放货,复合机器人与平台式AGV在转接处完成对接。
为了凸显二维码的轮廓,本文采用在原二维码基础上加入矩形外轮廓,中心与二维码中心重合,如图8所示。使用加入矩形外轮廓的二维码检测效果好,不易被误检测,可以显著提高边缘检测的正确识别率。
旋转处理模型
旋转处理即以中心点为旋转参考点,旋转修正,如图10a所示。设定P0(x0 ,y0) 为轮廓中心点坐标,B(x23 ,y23)为待修正后矩形一边的中心点坐标, A(x'23,y'23)为修正后矩形一边的中心点坐标。根据P0和B点坐标求得A点坐标,如式(3):
齿轮箱的装配和拆解过程严格按照工艺流程执行,验证了本文所设计的智能机器人仓储物流系统的可靠性及稳定性。平台式AGV与出入库平台的成功对接验证了本文二维码视觉定位的有效性及稳定性。