工业机器人地轨的精度是通过编码器的准确无误检测再通过伺服系统控制电机来实现,精度在±0.05mm范围之内。机器人与行走轴的信号接口及机械行系统接口采用数字信号进行传输,可以确保其稳定性和可靠性。
工业机器人地轨的几大特点
1.多自由度,每个运动自由度相互的空间夹角为直角。
2.自动控制的,能够重复编程,所有运动均按程序运行。
3.可靠性高、速度高、精度高。
4.适合于恶劣环境,能够长时间工作,便于操作维修。
5.各个工业机器人地轨均可采用滚轮导轨,具有可高速运行,安装调试方便,适合长行程运用。
6.伺服马达控制,通过精度减速机、重载滚轮导轨齿轮条进行传动,重复精度高。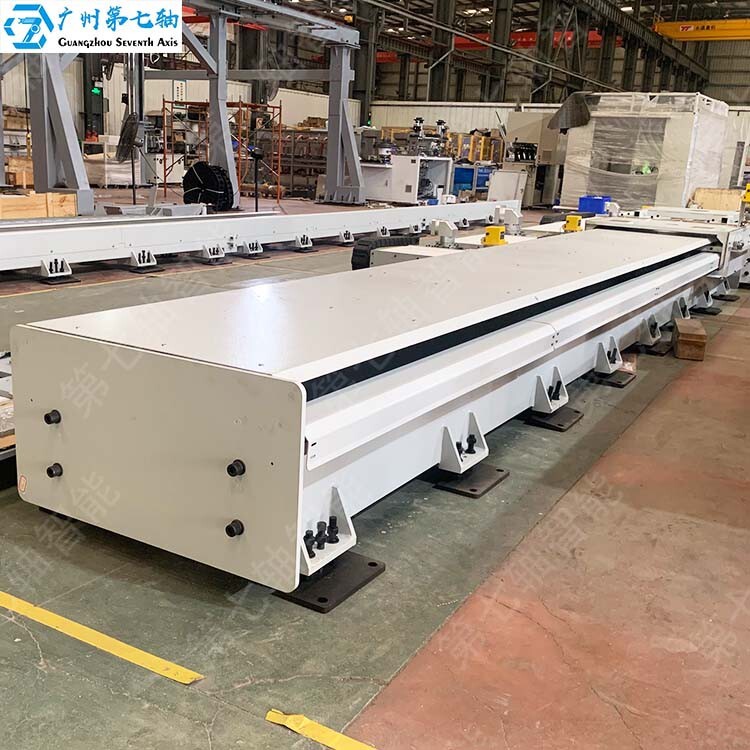
工业机器人地轨安装注意事项
1.在安装工业机器人地轨的过程中,大家要注意其应用的环境状况。
2.安装时的地面要坚固,不可以凹凸不平或是杂乱。在除此之外空间也有要求,要有足够的空间来运行。
工业机器人地轨的使用注意事项
1.注意定期维护和清理,其正常运转。
2.注意使用中的防尘。工厂环境中,生产工件很容易出现各种尘土或者细微颗粒物,这些如果进入到地轨内部会造成设备故障,因此一定要做好预防工作。
工业机器人地轨的系统功能
1.系统程序控制:地轨系统与“模架”的信号接口及系统接口全部都是采用数字信号传输,从而互相之间的稳定性以及牢靠性。具备手动和自动两种运转控制方式,手动当时下可单操作某一个工作,自动方式下按设定的运转程序自动运转。
2.软件功能作用:完成工位无序工作,即:随机发起工作信号,七轴可以依据发起的先后顺序一次完成工作;并且在信号复位后可以肃清掉一些未执行的信号。
3.急停连锁公用:随意激起任何一个急停按钮,七轴可以立刻中止正在完成的动作,只要在该急停重新复位后设备才回复正常运转。
4.信号保障性:在较短的时间内连续给出两次信号,机器人行走轴只执行一次信号而不会连续工作两次;在程序晋级后,有完好的系统备份。
5.移动与定位:可经过操作面板及显示屏直接编辑,理论上在直线轴有效行程范围内,能够设置无数个定位点。位置精度有编码器准确检测,经过伺服系统控制电机,精度在±0.5mm范围之内。
6.保养及维护:外用钥匙维护开关,当某个模架不用时(如:某个模架呈现毛病需维修),采用外用钥匙维护开关跳过此模架,这样不会由于人为的误操作或其他的不测而造成产品的报废。
7.急停按钮:每台模架具备在紧急状况时终止整个系统的急停按钮。
8.系统接口:一切硬件接口和软件功用由提供方对接,所有客户的需求。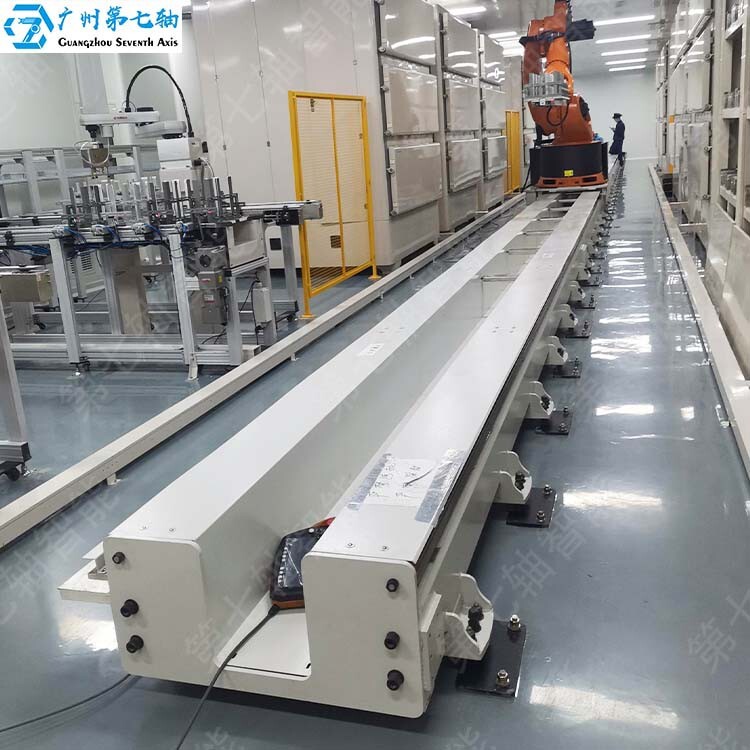
工业机器人地轨安装的时候要注意齿条和齿轮的安装,齿条和齿轮装置后不要马上投入运用需要对其先停止调整:检查齿轮和齿条的装备可否正确;检查齿轮接触可否倾向一段,需经过运转来调试;观察是否有恰当侧隙;运转前需对尺寸、齿条停止光滑。












