当机器人发生异常或故障时,立即停止机器人,排除故障并重新启动后继续巡检。在巡检完成后,将机器人停止并归位到位置,同时进行数据存储和分析,汇报巡检结果和发现问题,以便及时解决和改进巡检工作。
启动机器人前,确认机器人巡检的路径,并在路径周围设置好障碍物警示标志,以确保机器人行进过程中不会撞到物体或造成安全隐患。
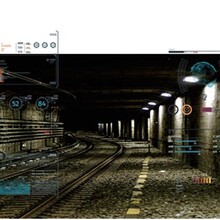
在机器人巡检途中,要时刻观察机器人运行状态和巡检情况,确保机器人按照预定路径行进以及进行必要的变道和避障。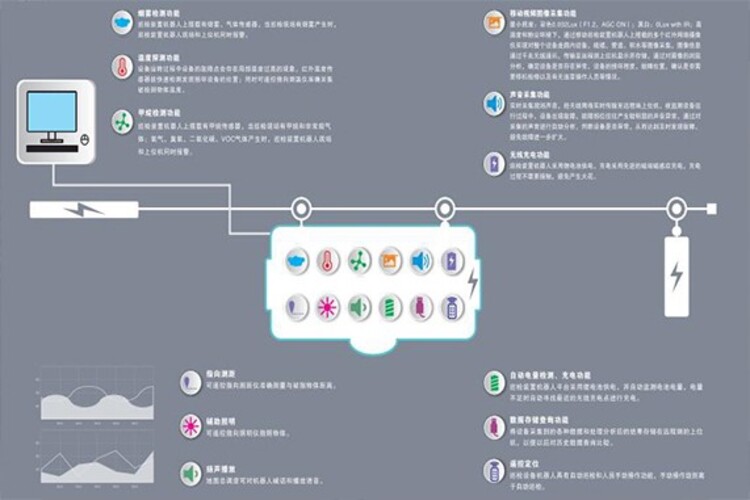
确保机器人电量充足,避免在巡检过程中因电量不足导致停机或故障。在启动机器人前,检查机器人各部件是否完好无损、连接是否紧密、传感器是否灵敏可用。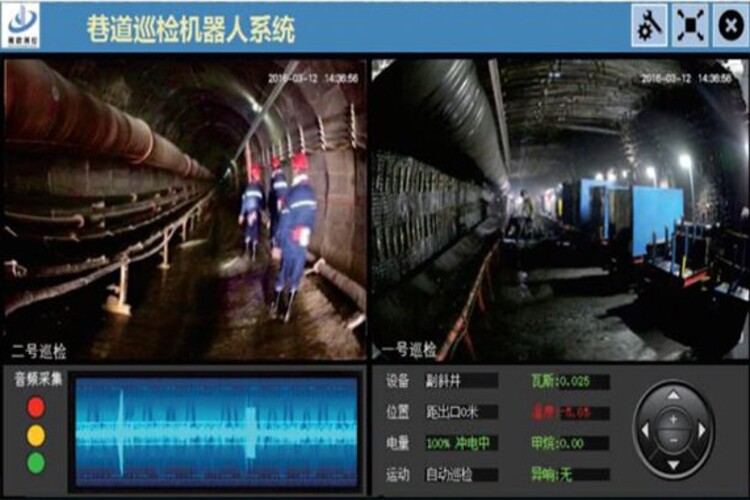
保持机器人软件更新和维护。 为保持机器人巡检数据和巡检信息的准确性,要定期更新机器人巡检软件和相关数据信息。
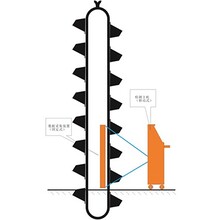
皮带巷道巡检机器人是一种用于在巷道内进行检查和维修的机器人,其主要任务是检测和维护巷道内设备的正常运行。