参数名1
参数值1
参数名2
参数值2
参数名3
参数值3
参数名4
参数值4
参数名5
参数值5
参数名6
参数值6
F-100iA/105发那科FANUC机器人维修保养讲解 width=600;}src=CityAlbum/202207/104.gif/>:工业机器人四大家族品牌分别为:FANUC(发那科),ABB,YASKAWA(安川),KUKA(库卡),工业机器人通常由核心零部件。
当你的机器人出现短路、无法开机、LED全亮、报警、上电无反应、无通讯、上电不动作、过热、冒烟、无法启动、内部错误、LED2红灯亮、竖线、花屏、黑屏、按键不良、白屏、闪屏、启动报警、温度高等故障维修可以及时联系昆泰自动化。 按键问题,屏幕显示问题(屏碎,花屏,白屏,黑屏等),通讯问题(触摸无反应,触摸反应慢等),电源故障,主板问题,系统问题等工控机无法安装操作系统,工控机按下开关,可以看到指示灯亮,但屏幕无显示,工控机开机屏幕出现英文或数字报错。出现此种ABB工业机器人维修故障的原因是驱动器的主回路损坏或者驱动器的开关电源损坏。东莞ABB工业机器人伺服驱动器通电无显示故障维修案例检查伺服驱动器开关电源及逆变电路正常。当主回路的2个充电热敏电阻、三相整流桥烧坏,以及部分线路板的连接铜箔有烧断的情况存在,故障原因是主电路对地短路导致其相关元器件损坏,将上述损坏元器件更换成新的既可以。东莞ABB工业机器人伺服驱动器通电无显示故障维修案例检查伺服驱动器主回路是正常的,但开关电源IC的第7脚测量为0V,正常应该是15V。导致电阻R2变成了开路。将IC使用电烙铁焊下检查确定3844bIC损坏,将其更换成新的,R2电阻恢复正常,通电伺服驱动器正常工作。
采用新一代电机和紧凑型齿轮箱速度加快,节拍缩短—运行速度平均增加5%能够适应严酷的工作环境并可选配FoundryPlus2防护等级平均功耗降低15%ABB机器人IRB6700是基于成熟的机器人技术。
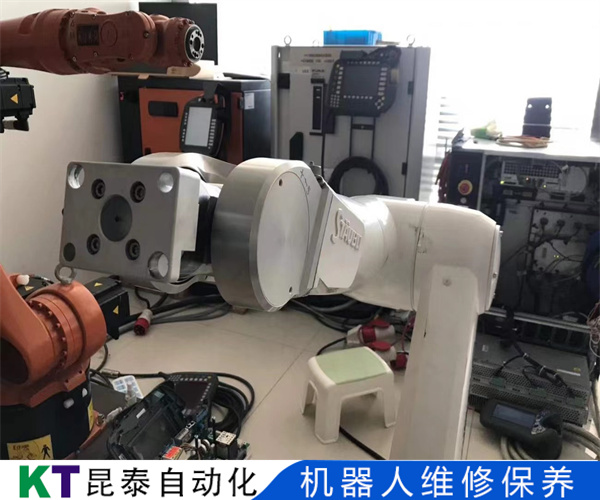
可以机器人技术有限公司,是一家第三方工业机器人维修技术服务商,除了安川机器人伺服驱动器维修,还有安川机器人伺服电机维修、安川机器人示教器维修、安川机器人伺服放大器维修等等,出现无法解决的故障欢迎咨询。:新闻IGM机器人K6示教器无法通讯故障维修安川机器人伺服电机故障维修安川机器人伺服电机启动不了维修IGM机器人K6示教器无法通讯故障维修安川机器人伺服电机故障维修安川机器人伺服电机启动不了维修机器人和机械手在工业应用中的区别工业机器人示教方法分析安川Motoman机器人本体维修及标准保养机器人伺服电机维修>机器人驱动器维修>安川机器人伺服驱动模块输出电压过低维修机器人驱动器维修|安川机器人伺服驱动模块维修常坏原因(1)保持风门与变频运行一样的开度工频试转。
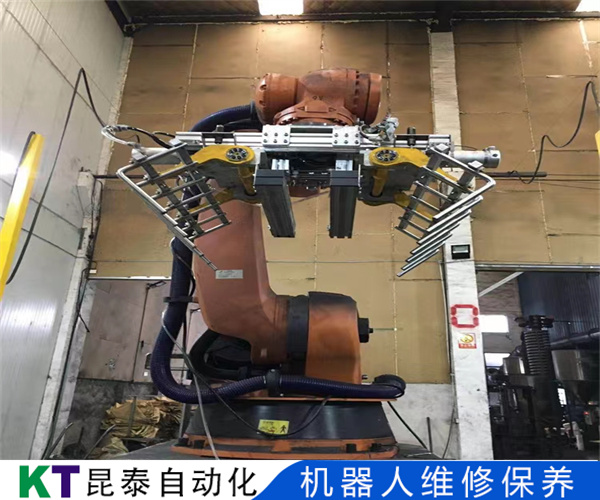
F-100iA/105发那科FANUC机器人维修保养讲解 1、停止运行:如果机器人出现过载故障,应立即停止其运行,以防止进一步的损坏或安全问题。 2、检查负载情况:检查机器人的负载的重量、位置和分布情况。确保负载没有超出机器人的设计和规格范围。 3、检查机械部件:仔细检查机器人的机械部件,如关节、齿轮、传动系统等。寻找损坏、磨损或松动的迹象。必要时,进行维修或更换损坏的部件。 所以安川的机器人的特点就是负载大,稳定性高,在满负载满速度运行的过程中不会报警,甚至能够过载运行,因此安川在重负载的的机器人应用领域,比如汽车行业,市场是相对较大的,安川机器人稳定性好,精度没有那么高,但是安川机器人价格优势明显。 三相整流桥烧坏,以及部分线路板的连接铜箔有烧断的情况存在,故障原因是主电路对地短路导致其相关元器件损坏,将上述损坏元器件更换成新的既可以,东莞ABB工业机器人伺服驱动器通电无显示故障维修案例检查伺服驱动器主回路是正常的。
 4、检查控制系统:检查机器人的控制系统,包括传感器、编码器、驱动器和控制器。确保传感器和编码器的读数准确,驱动器输出稳定,控制器工作正常。修复或更换故障的控制系统元件。 5、检查机器人环境:检查和排除机器人工作环境中的异常情况。例如,清除阻塞物或障碍物,改善温度、湿度或振动条件等。 6、测试运行:在进行维修和调整后,进行运行测试以验证机器人是否正常工作。确保机器人的负载在正常工作范围内,没有发生过载故障。
4、检查控制系统:检查机器人的控制系统,包括传感器、编码器、驱动器和控制器。确保传感器和编码器的读数准确,驱动器输出稳定,控制器工作正常。修复或更换故障的控制系统元件。 5、检查机器人环境:检查和排除机器人工作环境中的异常情况。例如,清除阻塞物或障碍物,改善温度、湿度或振动条件等。 6、测试运行:在进行维修和调整后,进行运行测试以验证机器人是否正常工作。确保机器人的负载在正常工作范围内,没有发生过载故障。本体关节轴无异响机器人系统备份所有机器人在进行常规保养前确认完系统状态后,进行系统备份。(备份体现当前机器人信息)机器人本体型号确认确认机器人本体型号,确定各轴油脂补充,以及工具需求,确定各轴换油的油品种类以及各轴用油量;控制柜风扇除尘本体电池、控制柜电池更换服务过程:将机器人进行备份并将摇至排油对机器人各关节进行排油并加油机器人本体电池跟换机器人控制柜电池进行更换、控制柜进行清理安川维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例飞克广东省东莞市松山湖园区中集智谷23栋12楼安川维修案例安川机器人伺服电机维修更换:2020/12/服务内容:安川机器人伺服电机维修更换机器人系统备份机器人在进行维修前确认完系统状态后。 负载惯量越大,设定值越大,在系统不产生振动的情况下,设定值尽量较大,但是增益越大,偏差越小,越容易产生振动,(3)速度积分常数,一般情况下负载惯量越大,设定值越大,系统不产生振动的情况下,设定值尽量较小。
如果200V电源没有请检查供电线路,另一种情况事故200V电源已提供给PSU,请切断电源检查丝:a丝毁坏,及时查看丝毁坏故障原因:查看PSU与其他电路板间的,CPCP3连接件是否接触良好,如果浪涌吸收VS1短路请更换。 解决重新校正,现象部分区域触摸准确,部分区域触摸有偏差,原因表面声波触摸屏四周边上的声波反射条纹上面积累了大量的尘土或水垢,影响了声波信号的传递所造成的,解决清洁触摸屏,特别注意要将触摸屏四边的声波反射条纹清洁干净。
确认进行常规保养前机器人经过至少超过1个小时停机(换油正常,不被本体温度影响)02川崎机器人系统备份所有机器人在进行常规保养前确认完系统状态后,进行系统备份。(备份体现当前机器人信息)03型号确认,油卡制定确认机器人本体型号,确定各轴注油口和出油口,以及工具需求,确定各轴换油的油品种类以及各轴用油量;04更换本体油脂拆除出油口和注油口的油封,在注油口处安装油嘴,出油口处进行废油收集。利用油枪进行注油,在出油口观察出油状态,确认出油口流出新油后停止加油,按照此流程完成机器人6各轴的注油工作,并注意废油的收集;05川崎机器人运动测试油脂加注完成后,机器人进行运动测试,确认油脂加注稳定性(此时,不要将注油口和出油口的油封安装)06完成油封安装将注油口。
F-100iA/105发那科FANUC机器人维修保养讲解 1、识别错误代码:,需要仔细阅读和理解机器人显示的错误代码。这些代码通常可以提供关于故障原因的线索。 2、检查硬件:根据错误代码,检查可能出现问题的硬件部分。这可能包括电机、传感器、电路板、电源等。检查这些部件是否有明显的损坏或故障。 3、检查软件:如果错误代码指向软件问题,那么可能需要检查机器人的程序或操作系统。这可能包括检查是否有的软件更新,或者是否需要对程序进行修改。 4、重启机器人:有时,简单的重启就可以解决一些临时性的问题。尝试关闭机器人,等待一段时间后再重新启动。 确认进行常规保养前机器人经过至少超过1个小时停机(换油正常,不被本体温度影响),02安川机器人系统备份所有机器人在进行常规保养前确认完系统状态后,进行系统备份,(备份体现当前机器人信息),03安川机器人本体型号确认。

会有不同的解决办法,机器人伺服电机维修如由机械共振引起的噪声,在伺服方面可采取共振,低通滤波等方法,总之,噪声和不稳定的原因,基本上都不会是由于FANUC伺服电机本身所造成,故障Fanuc伺服解决电机有噪声不稳定原因分析篇:伺服电机维修案例之231链条2(0V)异常篇:发那科机器人伺服电机启动困。就求出静电机的磨损量。为补偿基准设定示教两个补偿基准点:点:在这点会测出总的磨损量。条件如下:示教一个普通移动点,放在距第二点不超过100mm的。第二点:在这点会测出动电极磨损量,以inlineformINITNEW呈现。如图所示:条件如下:在修磨器上安装一个标定板;标定板能承受500N的压力;示教时,动静电极要接触但不压标定板。两点示教如下图所示:前提条件:当前选择的焊枪做过压力标定及压力测试合格。外部焊枪以压紧的新帽来校零。设定配置—ServoGunTorqueControl—Configuration:FirstInitforce(初始化压力一般为2.5KN),TCPorientation(补偿方向)。
这样突然关机会导致硬盘磁道损坏,数据丢失。不要随意触动硬盘上的跳线装置。搬运时一定要用抗静电塑料袋包装或用海绵等防震压材料固定好,经常检查,以防侵蚀。在操作系统中有节能功能时要尽量合理使用,以延长硬盘使用寿命。光驱:在使用中不要随意打驱门,不能使用有损伤、盗版光碟,防止灰尘进入光驱内,光驱在使用过程中不要震动,歪曲,拍打。数据线要连接通畅,光驱读盘顺利。软驱:不能把坏盘、有毒盘放入软驱中,勿使用劣质和发霉的软盘,匆用尖锐的物品碰撞以防划伤磁头。当软驱正在对磁盘进行读写操作时(软驱指示灯亮),不要强行将磁盘取出,以防损伤磁头或使磁头偏移,导致无法正常读写。ABB工业计算机维修中硬盘修复常见故障:硬盘在运行程序的时候非常缓慢。
TgEfOguVtKf