





汽车检测设备海道尔夫伺服电机维修团队技术强伺服电机抱闸没有松开,伺服电机和电机UVW相接线不正确,伺服电机和电机UVW相接线中一相或全部断开AL42RL42过载伺服电机控制板或电源模块有问题,伺服电机编码器电路故障,伺服电机与电机不匹配,伺服电机抱闸没有松开,伺服电机和电机UVW相接线不正确。伺服电机和电机UVW相接线中一相或全部断开AL43RL43再生故障超过内置再生电阻允许的再生功率,负载惯量过大或导电太短,再生电阻断线,外置再生电阻阻抗值太大,伺服电机的控制电路故障AL51RL51伺服电机过热伺服电机的温度异常,伺服电机内部电路故障AL52RL52突入防止电阻过热冲入防止电阻过热。伺服电机内部故障,周围温度过高AL53RL53DB电阻器过热伺服电机内电路故障AL54RL54内部过热伺服电机内部电路故障AL55RL55外部过热伺服电机控制板故障AL61RL61超电压伺服电机控制板故障。
汽车检测设备海道尔夫伺服电机维修团队技术强
1.检查伺服电机的离心开关
如果您的伺服电机在伺服电机加速后使用离心开关切断“启动”电容器,则该开关的故障会导致伺服电机故障。目视检查开关,通常在伺服电机的后部或“钟罩”端部。
离心开关缺陷:
触点被污物堵塞
联络人无法自由移动
开关触点上有电弧
触点焊接在一起
2.检查伺服电机的冷却风扇
如果您的伺服电机是“开放式”设计,则可以看到伺服电机的外壳。寻找可能阻塞冷却风扇并导致伺服电机过热的灰尘和油渍;过热可能导致伺服电机的热过载开关关闭伺服电机(并且该开关可能会弹出以等待冷却并复位)。
如果没有负反馈,开环放大下的运放成为一个比较器,如果要判断器件的好坏,先应分清楚器件在电路中是做放大器用还是做比较器用,我们可以看出,不论是何类型的放大器,都有一个反馈电阻Rf,则我们在维修时可从电路上检查这个反馈电阻。 机械动作异常快(飞车)3.库卡机器人主轴定向不能移动或定向运动是不到位4.出现NC错误报警5.库卡机器人伺服电机伺服系统报警6,库卡机器人伺服电机编码器报警7.库卡机器人伺服电机卡住等;常州凌科自动化自动化设备有限公司是一家从事工业机器人维修。 鼠标失效了,我们这时可以松开驱动,从新按下去等待驱动指示I变为绿色即可,7从电脑中拷贝程序电脑中拷贝程序,以便C盘中程序丢失后,我们可以从D盘或者外部移动U盘中拷贝使用,解决方案:登陆后→按Num(此时显示器上Num为灰色。
伺服电机维修分析:
当前的分析主要集中在旋转组件上。转子条松动或断裂,端环开裂,转子偏心率,未对准以及联轴器/皮带问题是在当前特征中检测到的“烦”故障模式中的一些。电能质量问题(如有害谐波,电压不平衡和欠压/过压)属于电压分析所确定的问题。离线MCA以接地电阻测量而。但是其他测量值使伺服电机电路缺陷易于发现。测量阻抗,电感和电容等电气特性可以使分析人员充分了解绕组的状况。电感是匝间短路的重要指标。接地电容可测量绕组污染(水,灰尘,灰尘等)的量。这些变化都会影响阻抗(交流电路的总电阻)。这些特性在相间和相对地之间进行测量,并相互比较,以及与基线的百分比变化,以识别伺服电机电路缺陷。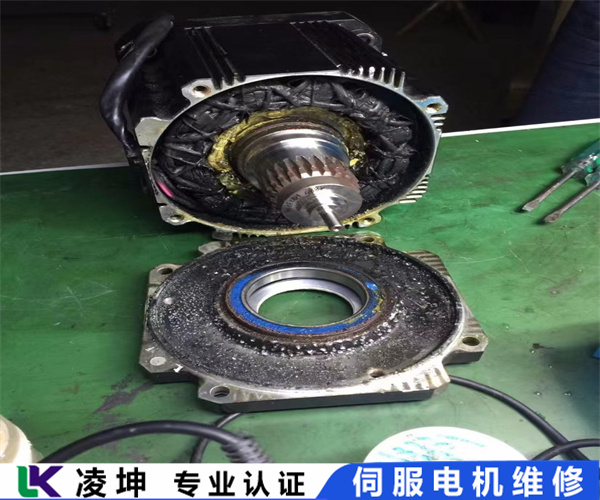
外围接线错误,如二线制、三线制接线及有关参数设定有误。多功能输入端子设定错误(在外控情况下)。伺服电机在故障保护状态。电机故障。伺服电机故障。(2)参数不能设定锁定。请解密后再设定。伺服电机运行中。接插件连接异常,数字操作器通讯异常。断电后将操作器取下,重装上去试一下。(3)电机不能反转反转被禁止。(4)电机旋转方向相反。电机输出线接线错误,请将U\V\W中的任意三根线对调即可。(5)电机减速太慢减速设定太长,减小减速。加装制动电阻。加直流制动。(6)电机过热负载太大,实际力矩已超过马达的设定转矩。建议增大马达容量。环境温度太高,在温度较高的环境下,电机会烧坏请降低电机周围温度。电机的相间耐压不足。
将1赋给一个变量(使用循环策略),B相同时即变量等于1时,使用,SetDevice停止设备工作,建一个触发弹出输入窗口的变量,将变量赋1(使用策略),C触发输入窗口的变量等于1时,并且弹出输入窗口(需要自己做)。 ELECTRO-CRAFT伺服电机维修,NORMAG直线马达维修,Dayton伺服电机维修,BODINE伺服电机维修,(VICKERS)威格士伺服电机维修,FAS伺服电机维修ABB喷涂机器人维修3HNA伺服电机电源故障维修维护ABB机器人电源模块DSQC661常见故障解决方法常州凌科自动化科技有限公。 有了信号也会触发)这样即使程序运行到25行,PLC发过信号,机器人运行到26行di信号没有,但执行过中断程序(执行中断过程,机器人运动不停),flag1被置为true,机器人运行到27行,由于flag1为true。 破损或许接触不良,查看带制动器的伺服电机其制动器是否现已翻开,监督伺服电机的面板承认脉冲指令是否输入,Run运转指令正常,操控形式挑选方位操控形式,伺服电机设置的输入脉冲类型和指令脉冲的设置是否共同,确保正转侧驱动制止。
汽车检测设备海道尔夫伺服电机维修团队技术强绝缘老化,或引出线与接线盒壳碰;对应电机维修方法:干燥、更换绕组;表现:电机振动电机故障原因:1.转子不衡;2.轴弯曲;3.皮带盘不衡;4.气隙不均匀产生单边磁拉力对应方法:1.校正动静衡;2.校直轴或更换轴弯曲不严重时可车去1-2mm然后配上套筒;3.校正衡4.重新调整;表现:电流三相不衡电机故障原因:1.电源电压严重不足;2.三相匝数不等;3.内部接线错误。对应方法:1.检查电源电压;2.更换伺服电机机或处理;3.改正接线。表现:空载电流偏大伺服电机故障原因:1.定转子气隙大2.定子绕组匝数太少;3.装配不当对应方法:1.调整并使之减少2.重新核实并绕制;3.重新装配;表现:绝缘电阻降低电机故障原因:1.定子进水受潮; kjgsegferser
BORUNTE机器人上电无反应维修保养电源灯不亮维修收藏学习
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修
LRMate200iD/7WP发那科FANUC机器人维修保养如何排查
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修

Yaskawa机器人马达维修主机维修可测试
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修

收藏库卡KUKA机器人KPP维修服务态度好
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修

咨询库卡机器人SID板维修公司规模大
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修

新松机器人冒烟维修保养噪音大维修看这里
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修
伯朗特机器人短路维修保养黑屏维修故障诊断
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修

收藏库卡机器人RDC解码板维修修必好
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修