




KR30L16-2C库卡KUKA机器人维修无显示汽车工业正在使他们的制造工厂自动化。例如,福特使用机器人改进了其2013Escape模型的装配。机器人使用激光和照相机将挡风玻璃,门板和挡泥板比以前更紧密地安装在一起。零件之间的缝隙现在更小,从而使空气动力学更安静。激光视觉机器人可以检查自己的工作。机器人可以在车辆上使用油漆和密封剂。
KR30L16-2C库卡KUKA机器人维修无显示
1.日常检查
一些基本功能应该每天发生,以确保工业机器人按照标准运行。这些检查是粗略的,但会在工业机器人开始日常操作之前发现大多数明显的问题。这些检查如下:
目视检查外部组件是否损坏和磨损。
清除传感器或光学组件上的所有灰尘或碎屑。
检查是否有润滑脂或机油泄漏,必要时进行清洁和重新加注。
聆听是否有任何过度振动或异常噪音。
过程流的类型,速度,预算,零件放置和尺寸,对于需要将单个点分配到零件上的管键合或针头组件之类的应用,单轴机器人可能是理想的选择,机器人每次都到相同的分配,为了分配粘合剂或粘性,在两个基本直线模式中。 与落地式模型相比,它具有更大的能力进入更狭窄的空间和不同的角度,这些类型的机器人工作单元可以通过具有较大的工作范围来减少某个区域所需的机器人数量,它们还节省了空间,这对于具有更紧凑的地面布局的制造商而言是一个优势。 它的切割库存储了管子的尺寸和特征,便于零件更换,它还提供嵌套功能,以利用库存,并且其存储器可以保存从一根管子制造多达四个特零件的指令,在过去的五十年中,激光和工业机器人的使用改变了世界各地的制造方式。
2. 月度检查
月度检查应该比每日检查更详细,但在很大程度上仍然是肤浅的。这些将捕获任何操作问题并防止发生的大多数问题:
清洁和通风机器人控制器的冷却风扇,以限度地提高气流。
备份机器人控制器的内存。
对运动中的机器人进行目视检查,检查机器人、线束和电缆。
FS100比以前的DX100型号快2-4倍,FS100控制器的开放式设计提供了友好的用户界面和更轻松的编程,这种开放式架构还提供了广泛的软件功能,使控制器的软件定制变得轻而易举,该功能强大的控制器可与14种Motoman机械臂模型一起使用。 只需对塑料焊接所需的较低热量进行少量调整即可,凌科自动化可以帮助您为生产线选择合适的塑料焊接机器人,请致电与我们,以获取有关当今集成的更多信息,机器人码垛与常规码垛码垛设备有多种形状和尺寸,尽管有许多不同的码垛设备布局。 凌科自动化的高技能工匠团队将致力于为您的机器人定制具有视觉组装应用所需的所有功能,有关视觉机器人组装的更多信息,或要了解有关凌科自动化自动化的更多信息,请立即在线或通过740-与我们251-4312,避免混乱:推式连接器减少飞溅焊接飞溅是在焊接过程中金属熔化期间排出的非金属材料小颗粒。
3. 季度检查
季度检查甚至比月度检查更详细,并且侧重于安全功能和固定装置。这些检查包括以下内容:
检查机器人与任何电源、风扇或安全设备之间的所有连接。
检查所有设备电缆是否有任何扭结、夹点、切口、撕裂或连接松动。
拧紧所有螺栓,尤其是外部安装螺栓。
详细清洁机械装置以清除任何碎屑或碎屑。
以在不同的温度水平下运行,许多人能够忍受在冷藏或冷冻环境中工作,它们还能够处理不平整和易损坏的表面,这就是为什么对这些抓手进行编程以处理材料公差差异的原因很重要,总而言之,这些机器人食物抓手的使用为操作人员带来了一定的速度和准确性。 可靠性和灵活性的同时,凌科自动化是FANUC,Motoman,ABB,UniversalRobots和KUKA机器人系统的认证集成商,能够将视觉功能集成到几乎任何物料搬运或焊接机器人上,凌科自动化可帮助客户设计适合其需求的机器人系统。 在制造过程的某些部分操纵工件,有几种不同类型的抓手,气动抓手是一种模型,它是一组金属夹爪,它们可以聚集在一起并拾取物体,它们之所以称为[式"抓手,是因为它们的颚部卡在某物上时发出的声音,气动抓手是制造业中使用广泛的抓手之一。 由MotomanRobotics公司提供的该型号因其结构和精度而非常适合打磨和磨削应用,EA1400可能是寻找电弧焊接机器人的理想之选,该型号及其多种变型将提高您的焊接速度和准确性,提高焊接的性。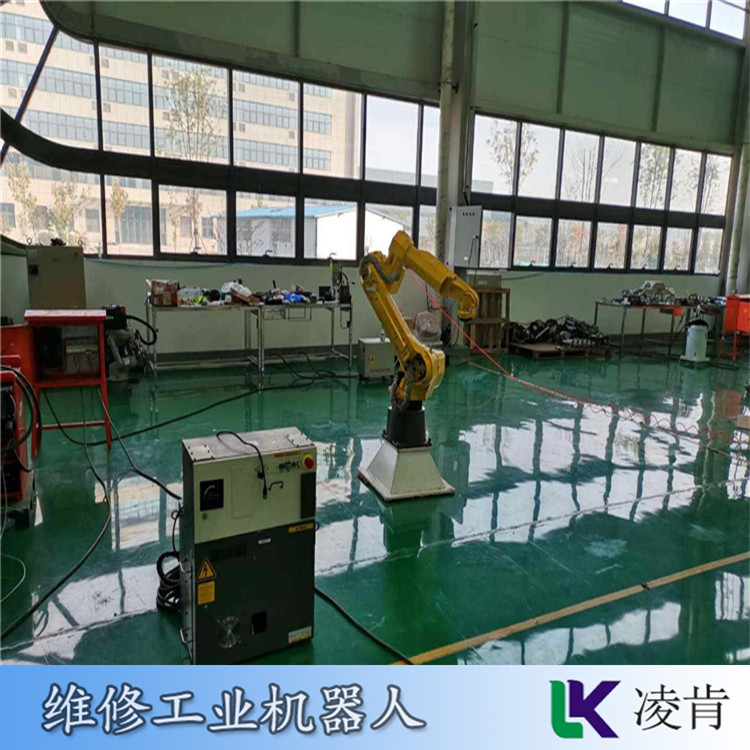
虽然此过程需要多达四个半小时的人工,但机器人可以在24分钟内完成。这种速度是使涂装过程自动化的更具吸引力的好处之一。涂装自动化的另一个好处是?缺乏过量喷涂。由于机器人,因此不会浪费大量油漆。事实上,它们不仅不浪费大量涂料,而且在对象上使用的涂料也更少。文章指出,自从波音公司转向涂装自动化以来。
KR30L16-2C库卡KUKA机器人维修无显示它具有集成的传感器和创新的控制算法,可以使其屈服于外力。LBR具有灵敏的触感,可以感觉到其朝向物体的方式,并可以被人类轻轻推开。它允许自己被引导,这就是它收集信息和“学习”的方式。此外,它可以教导操作员复杂的运动序列。虽然仅重14公斤,但它仍然是一款功能强大的升降机。其接头采用CRP结构连接。 kjgsefgerfws

埃斯顿ESTUN伺服电机故障代码维修过载维修规模大
498元
产品名:三菱伺服电机维修,安川伺服电机维修,松下伺服电机维修,发那科伺服电机维修

贝塞德BAYSIDE伺服电机故障代码维修编码器故障维修一对一服务
498元
产品名:三菱伺服电机维修,安川伺服电机维修,松下伺服电机维修,发那科伺服电机维修

siemens伺服编码器零位调试维修修复率高
498元
产品名:三菱伺服电机维修,安川伺服电机维修,松下伺服电机维修,发那科伺服电机维修

宝盟主轴编码器调零维修修复详情
498元
产品名:三菱伺服电机维修,安川伺服电机维修,松下伺服电机维修,发那科伺服电机维修
禾川伺服电机故障代码维修编码器故障维修服务好
498元
产品名:三菱伺服电机维修,安川伺服电机维修,松下伺服电机维修,发那科伺服电机维修
汽车检测设备德国博世力士乐Rexroth电机维修有质保
498元
产品名:三菱伺服电机维修,安川伺服电机维修,松下伺服电机维修,发那科伺服电机维修

焊接设备欧库马OKUMA伺服电机维修没有修不了的
498元
产品名:三菱伺服电机维修,安川伺服电机维修,松下伺服电机维修,发那科伺服电机维修

写真机冯哈伯伺服电机维修可开票
498元
产品名:三菱伺服电机维修,安川伺服电机维修,松下伺服电机维修,发那科伺服电机维修