





桁架式机械手是一种建立在直角X,Y,Z 三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。其控制核心通过工业控制器(如:PLC,运动控制,单片机等)实现。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
如何确定桁架式机械手的参数
1、运动行程:即X、Y、Z轴三个方向(左右、上下、前后)的运行距离;如果是2轴,则需要确定X和Y轴(左右、上下)的运行距离。
2、工件重量:桁架式机械手的主要功能就是实现工件的轨迹运动,因此工件的重量参数即为重要,轻者不能满足运动需求,重者还会引发安全事故,且机械手的负载能力远超过工件的重量,具体负载能力还需要根据运行速度和工件的重要来确定。
3、运行速度:机械手的运行速度和机械手的负载能力相关,负载运行速度要求越高,对机械手的负载能力要求也就越高;同时,运行速度的要求不同,机械手的运动方式也不同;运动方式有电动,气动,液压三种类型,其中电动有齿轮齿条结构,滚珠丝杠结构,同步带传动,链条传动以及钢丝绳传动等。
桁架式机械手的特点:
1.采用高强度结构钢,整体强度高,不易振动摇晃。直线导轨和齿轮齿条运动机构,承载能力强,刚性佳。
2.安装调整要求低,相比于繁杂的关节机器人,结构设计便于人员理解、操作简单、维护方便。
3.便于维护,导轨如果有损伤,螺栓连接方式,更换方便。
4.可配置为全闭环系统,即会实时检测机械手控制系统发出指令和实际位置是否一致(如非全闭环、齿轮损坏等实际不移动不准确,而控制系统无法感知),Z轴检测到往下掉时可机械锁止,防止发生安全事故。
5.,相对于同等负重的关节机器人,桁架机械手的造价成本更低。
6.桁架式机械手一般架在设备上方,不占用地面空间,更利于车间规划和作业的便利性。

广西生产焊接变位机加工机器人焊接变位机厂家
面议
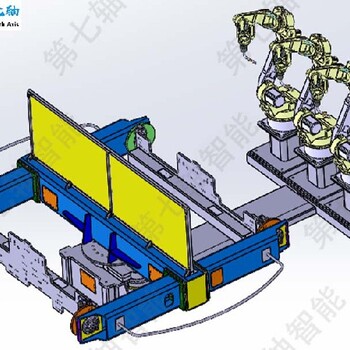
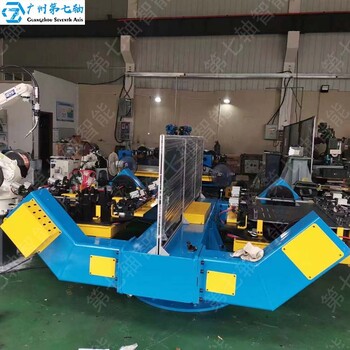
产品名:焊接变位机

徐州生产焊接变位机尺寸机器人焊接变位机厂家
面议
产品名:焊接变位机

珠海国产变位机厂家机器人变位机自动焊接翻转台
面议
产品名:变位机

上海供应龙门桁架机械手,桁架机械手
面议
产品名:龙门桁架机械手,桁架机械手,桁架机器人,龙门桁架
工业焊接变位机操作流程,变位机厂家
面议
产品名:焊接变位机
黄浦工业焊接变位机,变位机
面议
产品名:焊接变位机,焊接辅助设备变位机,焊接翻转变位机,伺服变位机,变位机厂家

达州定制第七轴机器人龙门桁架服务周到,机器人龙门机械手
面议
产品名:机器人龙门桁架,龙门式桁架,机器人 龙门机械手,重载机器人桁架

广州智能第七轴机器人单臂桁架,机器人桁架
面议
产品名:机器人单臂桁架,机器人桁架,机器人桁架机械手,智能机器人桁架