





雕刻机日弘忠信电机维修概述 竖线,竖带,花屏,摔破等维修安川示教盒按键不良或不灵维修安川示教盒有显示无背光维修安川示教编程器数据线不能通讯或不能通电,内部有断线等维修安川伺服电机(servodrives)又叫[安川伺服控制器",[安川伺服放大器"。
凌坤自动化以技术实力为依托,建有商务部、业务部、技术部、售后部,经过多年耕耘,凌坤自动化实现了跨越式发展,得到了各大企业的普遍认可,获得多项殊荣。总公司拥有50几名技术的工程师,技术在行业内都是厉害的。目前有员工七十多名,其中维修工程师50几名,拥有雄厚的维修实力,是值得您信赖的维修公司。 凭着高科技和的测试维修设备、良好的服务保障在消费者心目中竖立了良好的企业形象。
竖带,花屏,摔破等(更换液晶屏)kuka酷卡机械手示教盒按键不良或不灵(更换按键面板)kuka机器人示教盒有显示无背光(更换高压板)kuka机械手教导盒操纵杆xyz轴不良或不灵(更换操纵杆)kuka机器人教导盒急停按键失效或不灵(更换急停按键)kua机器人教导盒数据线不能通讯或不能通电。 一个导体通电时就会在其所占据的一定空间范围产生磁场,所以能载流的电导体都有一般意义上的感性,额定交流电流是从发热方面设计电抗器的长期工作电流,同时应该考虑足够的高次谐波分量,ABB机器人驱动模块维修即输出电抗器实际流过的电流是伺服电机电机负载的输出电流。 它关系到弧焊机器人的工艺性能,现在弧焊机器人的摆动功能差别很大,有的机器人只有固定的几种摆动方式,有的机器人只能在x-y面内任意设定摆动方式和参数,佳的选择是能在空间(x-y,z)范围内任意设定摆动方式和参数。
雕刻机日弘忠信电机维修概述
1.如果未知伺服电机的正确对齐数据,则在拆卸电机之前收集该数据,以便在组装过程中正确地重新对齐。
2.拆卸电机后,再次将编码器对齐,以使其与转子上的磁铁和定子绕组正确对齐。
3.如果更换了编码器,则调整组件。
4.换向的动态对准(在旋转时设定)是通过在正向方向上反向驱动电机并使用示波器将定子/转子的产生电压输出与相应的换向通道进行比较来实现的。
5.示波器从线到线的定子电压轨迹以及来自相应霍尔开关的方波波形代表一相到相电压和一个转子位置反馈信号。
6.大多数单元将具有三个位置反馈信号,这些信号将匹配多达三个线对线电压输出。
7.当反馈输出与其电压输出正确匹配时,调整一组输出也将调整其余两个。
刹车刹不住维修,刹车片更换,刹车线圈烧毁维修,伺服电机如何调整零位点,伺服电机进油保养,伺服电机发热维修,伺服电机抖动维修。伺服电机电流不衡修理。电流大维修,发烫维修,不出力维修,动一下就报警维修等等。一般性故障当天可修复好,维修电机工程师维修,修复率可达到。我们从事伺服电机(马达)的维修工作很多年。穆格伺服电机动一下就报警维修,维修各类型高精密伺服电机:伺服电机维修,交流伺服电机维修。直流伺服电机维修,编码器维修。编码器码片磨损报废技术改造,步进伺服电机维修,主轴伺服电机维修,电主轴维修,直线电机维修,多极旋转电机维修,测速电机维修,高速电机维修穆格伺服电机维修型号如下:1FE1116-6WR11-1BC2维修1FE11166WR111BC21FK6032-6AK71-1SG0维修1FK60326AK711SG01FK6032-6AK71-1SH0维修1FK60326AK711SH01FK6032-6AK71-1TA2维修1FK60326AK711TA21FK6032-6AK71-1TG0维修1FK60326AK711TG01FK6040-6AK71-1AG0维修1FK60406AK711AG01FK6040-6AK71-1AG2维修1FK60406AK711AG21FK6040-6AK71-1AH0维修1FK60406AK711AH01FK6040-6AK71-1TA0维修1FK60406AK711TA01FK6042-6AF71-1AA2维修1FK60426AF711AA21FK6042-6AF71-1AB0维修1FK60426AF711AB01FK6042-6AF71-1AG0维修1FK60426AF711AG01FK6042-6AF71-1AH0维修1FK60426AF711AH01FK6042-6AF71-1EA0维修1FK60426AF711EA01FK6042-6AF71-1EG0维修1FK60426AF711EG01FK6042-6AF71-1EG2维修1FK60426AF711EG21FK6042-6AF71-1EH0维修1FK60426AF711EH01FK6042-6AF71-1GB2维修1FK60426AF711GB21FK6042-6AF71-1GG0维修1FK60426AF711GG0维修各种品牌伺服电机维修故障:磁铁爆钢、磁铁脱落、卡死转不动、编码器磨损、码盘/玻璃盘磨损破裂、电机发热发烫、电机进水、电机运转异常、高速运转响声、噪音大。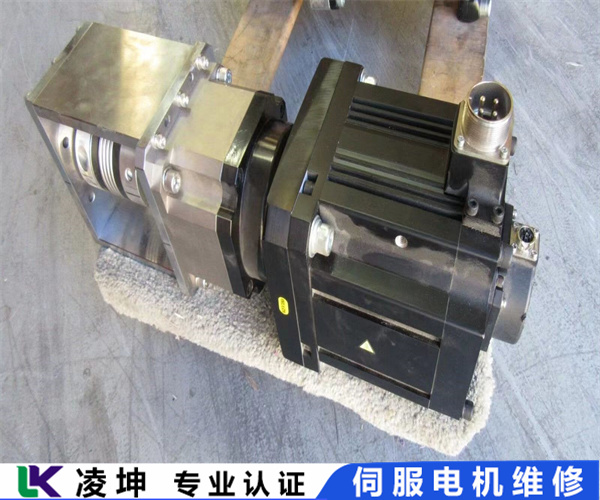
雕刻机日弘忠信电机维修概述
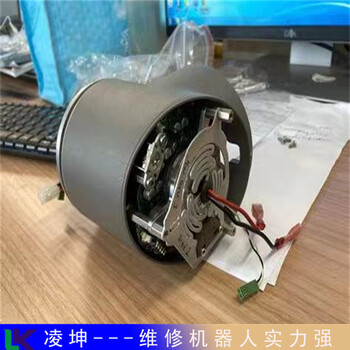
凌坤自动化技术人员使用制造商软件,并将编码器对准工厂规格。编码器因品牌而异。它们也非常脆弱,可能有些挑剔。成功对准后,使用型号特定的驱动器或放大器对伺服电机进行2-3小时的运行测试。如果没有适当的重新对准,交流伺服电机将无法工作。
而运行到3行的时候,cam_di信号被PLC置为FALSE了,那么执行4行的时候,机器人就会一直等待信号,实际上,cam_di信号曾经有过,只是机器人没有执行到waitdi语句,可以使用中断来实现上述要求创建一个bool变量flag1。 请将光标在对象上,然后连续敲击两次触摸板,二次敲击触摸板时,将手指停留在触摸板上并在表面滑动,以移动选定的对象带您伺服电机维修干扰具体解决方法,川崎机器人伺服电机维修知识信号,直接开始螺纹加工。 检测出刀具冲突,伺服-062BZAL报警(组:i轴:j)SRVO-062BZALalarm(Group:iAxis:j)[现象]尚未连接脉冲编码器的备份用电池时发生此报警,可能是因为工业机器人内部的电池电缆断线造成的。 在日常操作过程中,所有的伺服电机都会由于各种因素而产生的故障导致伺服电机停止工作,三菱伺服电机也同样如此,维修问题也给工程师添加了许多烦恼,下面就由小编来给大家介绍5种你看了就会的三菱伺服电机维修方法A。
雕刻机日弘忠信电机维修概述同时检查电机是否对地短路及电机线是否超过允许范围,如上述均正常则可能为伺服电机内部IG模块驱动或保护电路异常。一般IG过流保护是通过检测IBGT导通时的管压降动作的。当IG正常导通时其饱和压降很低。当IG过流时管压降VCE会随着短路电流的增加而增大。IG驱动保护电路通过二极管DB可测量饱和压降,并经过处理电路传送给CPU处理器,同时关闭IG输出达到保护作用。如出现Er15故障,现场处理时可更换驱动模块或检修相关电路。伺服电机常见故障处理(1)按下运行键,电机不转。运行方式设定错误,即运行方式在外控端子情况下,用面板操作起动或运行方式操作器情况下。用外控端子进行起动。频率指令太低或没设定。 kjgsegferser
协作机器人维修ABB工业机械臂维修保养建议收藏
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修
松下机器人内部错误维修保养LED全亮维修上门速度快
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修
M-2iA/3AL发那科FANUC机器人维修保养简易步骤
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修

鑫洋盛机器人伺服电机维修系统屏维修详情一览
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修
Yaskawa机器人电柜维修操作屏维修具体实操
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修

了解库卡机器人C1维修步骤详情
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修

库卡KUKA机器人烧坏维修保养花屏维修方法分享
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修
OTC欧地希机器人电柜维修控制器维修查找六步骤
498元
产品名:ABB机器人维修,发那科机器人维修,川崎机器人维修,松下机器人维修