利用labview为太阳能车开发遥测系统
概述:使用1组NI CompactRIO控制器与8槽式机箱,监控车辆的电压、电流、温度,与速度,再透过2.4 GHz数据机,将资讯无线传送至太阳能车后方的追踪车辆。
遥测(Telemetry)
WSC 与其他太阳能车赛不同之处,乃是团队完成达尔文(Darwin) 到阿德雷得(Adelaide) 共3,000 公里的距离;亦表示比赛期间可能随时发生问题,甚至影响车辆能否完成赛事。使用CompactRIO 可重设机箱与NI LabVIEW 软体,我们开发的摇测系统可监控、记录,并传输资料,以随时反应太阳能电池的状态(如上图1 )。受监控的资料可触发警示,在问题发生之前避免之;因此该笔即时资料可协助团对随时拟定佳对策,以缩短除错时间。同时系统亦将监控并记录驾驶的动作,以利赛后分析。
研发
虽然太阳能车本身的机械与电力资料,即为搜集与分析要点,但由于电子资料才是打造车辆的关键比赛要素,所以我们额外注重电子资料。我们所搜集的资料,包含设计阶段的电池与太阳能电池,还有电池的体积与其效能曲线均有。在赛程中搜集到的即时资料,有助于我们佳化车辆的性能,亦可比较车辆实际规格与设计规格之间的差异。另外,策略团队则使用此资料搭配天气预测,以计算出理想的赛程速度。我们并透过CompactRIO 内建记忆体而记录所有资料,以利赛后分析并供未来改进之用。
使用CompactRIO 与可重设机箱
因为CompactRIO能在可客制化输入通道上整合即时资料撷取功能,亦可记录并传输资料,所以我们选用CompactRIO。而NI cRIO-9104 - 8槽式机箱可安装任何必要模组,以满足我们的监控需求。透过多款NI模组,我们可随着专案发展而调整机箱,并着重于太阳能车的不同面向。NI cRIO-9014 - Real-Time控制器另内建记忆体与多种I/O,可提供弹性介面与次要的资料储存媒体。
我们的客制化机箱包含1组SEA cRIO-GPS+模组,可即时提供车辆位置;1组NI 9870序列介面模组,具备RS232介面,可撷取电池监控系统的资料;1组NI 9401数位I /O模组,可透过马达控制器端点取得车辆速度,并输出资料;4个NI 9219类比I/O模组,可监控火星塞、刹车、电流,与太阳能电池阵列的电压;还有1个NI 9211热电偶模组,可感测车辆周围的温度。我们另透过NI 9219通用类比I/O模组,以高度与解析度监控多种资料,包含电压、电流、温度,与电阻。
利用LabVIEW FPGA Module 进行程式设计
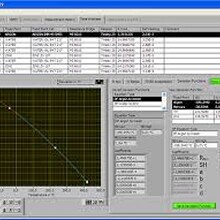
使用LabVIEW FPGA Module即可迅速且轻松设计此系统。另外,Express VI具备捷径功能,可让使用者迅速变更程式以满足需求。此外,我们在启动CompactRIO时随即执行程式,让整个系统成为无线架构,而不需实际接至系统再手动开始程式。我们虽属业余团队且程式设计经验有限,但直觉且图形化的图示与接线,都让我们能加快程式设计的速度且趣味盎然。因为并非所有模组都支援CompactRIO的Scan Mode,所以我们透过FPGA程式设计模式,整合了共8个模组。我们检视由追踪车即时搜集的资料,再根据公式化的程式拟定比赛策略(图2)。
图2. 追踪车上的即时资料
应用
在专案设计阶段,我们使用CompactRIO 控制器记录太阳电池的效能,以建立电池于不同气候条件下的效能曲线。我们连接电池与系统,以了解不同温度下的放电情形,并于每次试驾时记录驾驶的动作,以协助团队判别驾驶行动是否正确。
因为车辆完全由太阳能供电,我们将电子设备的耗电量降至低,让马达获得大部分的电力,才能完成赛程。客制化的8 槽式机箱可撷取如GPS、电池资讯、太阳能电池状态、马达效能,与驾驶动作的资料。接着将所有资料储存于cRIO-9014 – Real-Time 控制器内建的2 GB 记忆体,同时透过LabVIEW VI 将资料格式化为字串,再透过低耗电的2.4 GHz 无线电数据机,将资料传输到追踪车上(图3)。
图3. 遥测系统的程式区块图
Real-Time 控制器具备足够的储存空间,追踪车上亦装备1 组笔记型电脑。策略团队在追踪车上分析资料,并参考如道路、驾驶,与天候状况的外部因素,以决定车行速度。
完成所有试驾之后,我们接着分析资料并微调太阳能车的机械元件,如调整车轮、转向灵敏度、悬吊,与胎压,以提升太阳能车的性能。透过LabVIEW,我们可模拟澳洲所有的可能天候状况,这样我们更能有效评估太阳能阵列所提供的电力与功率。此外,我们也会在赛事过后分析所得的资料,以进一步强化新一代的太阳能车。
结论
因为我们在这个专案使用即时监测系统,且太阳能车所能提供的资料范围太过广泛,所以我们初并无法确定主要的焦点为何。随着专案的进展,我们于竞赛与设计阶段,均透过CompactRIO 绘制出电池在不同温度下的放电率图表,并借以了解自制太阳能矩阵的效能。本专案从设计、实际比赛,到后续分析的所有阶段,CompactRIO 实在助益良多。我们成功使用CompactRIO 为太阳能车开发了监控系统,且针对未来的更多太阳能专案,我们亦准备继续使用相同的机箱与控制器。
使用 NI TestStand、LabVIEW 与 PXI 开发植入式助听器测试系统
概述:使用 NI LabVIEW、PXI 电脑式仪器与 NI TestStand,建立一套自动化测试系统,能以 70% 的开发时间提供更多更灵活的功能。
我们针对内部研发使用了新的 PXI 架构功能测试系统,从电路板到组装完成的产品,测试了 8 种不同的应用。我们也使用这套系统在公司内部以及不同的代工厂中进行生产测试。系统需要执行众多的动作,包括捕捉、储存与分析 5 MHz 信号的波形,将电力与资料穿越皮肤,传送到植入物中。我们使用声音测量、电压参数测量、在不同负载情况下的电流测量,同时通过数字 I / O及 GPIB与外部设备沟通。我们使用 USB 通讯设备来控制定制电路板上的继电器、开关与其他的硬件。系统也能够准确调整共振电路并测试 I2C 通讯。系统会自动生成测试报告,同时通过网络进行存贮,供日后统计分析之用。
NI TestStand 成果斐然
新的功能测试系统协助我们在紧迫的时间压力下完成工作,将新产品的设计从概念阶段带入制造阶段。NI TestStand 为我们的 LabVIEW 测试模块制造了一个模块化、可重复使用的测试架构,NI TestStand 对我们来说非常实用。从的角度来看,我们现在可以在的短时间内就开发完成测试系统,因为与软硬件开发有关的大部分风险都被移除了。我们初期的训练投资成本也因为开发这个的时间缩短,而且收回了成本。在未来的开发中,因为我们的工程师已经习惯使用这些工具,所以我们预期开发的时间会缩短 30 %。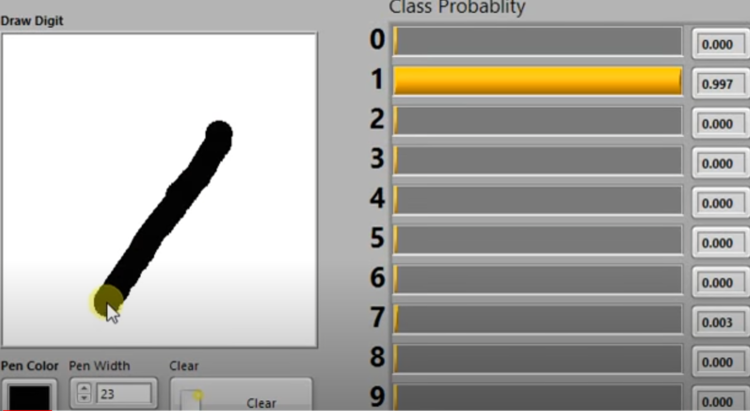
CompactRIO模块
涡轮增压器性能中重要的变量包含温度、压力和转速。系统组件包含多个NI C系列模块,包括NI 9217 RTD模拟输入模块测量电阻温度传感器(RTD)温度、NI 9211热电偶输入模块测量热电偶温度、NI 9203数据采集模块测量压力和电流、NI 9423漏极数字输入模块测量转速。此外,还采用了NI 9265同步更新模拟输出模块作为系统和模拟输出值的外部接口,NI 9425漏极数字输入模块和NI 9476源数字输出模块用于数字I/O值。检测系统由系统操作员通过用户界面进行控制。监视外部系统使得用户可以控制和管理整个系统。
结论
涡轮增压器是车辆引擎的重要部分,其性能直接影响整个引擎的性能。对涡轮增压器性能进行适当的测试是确保终产品质量的关键步骤。以前的PLC系统无法提供所需的精度。使用基于CompactRIO的全新检测系统替换PLC系统节省了空间,并且提供了更高的精度、更高的分辨率和更好的性能。此外,由于系统开发员熟悉CompactRIO的开发方法,可以在短时间内让系统开始运行,这样节省了时间和开发资源。
透过LabVIEW,我们可量测香蕉的电容而决定水果的成熟度。而且平行电容板之间的距离,将高度影响量测结果。后我们发现,若电容板之间达4公分将可产生正确的结果。电容与电压量测作业,既且不会损坏水果,实为合适的量测技术
使用LabVIEW 与DAQ 监控人体于动态平台上的摆动
概述:使用NI LabVIEW软体搭配NI资料撷取(DAQ)硬体建构平台,其表面具备122组应力感测电阻器(FSR)并能以200 Hz进行取样,以量测人体摆动与平衡的控制情形。
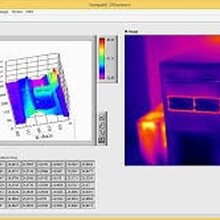
人体即使在直立时,亦需随时保持着稳定性。人体整合多种机制,才能避免身体在静、动态的条件下跌倒。测力板(Force platform) 与Stabilogram 均为量测、量化人体平衡度的标准。另根据时间概念而搜集压力中心(COP),以呈现姿势控制的结果。基本上是以表面支撑人体中心,再垂直投射相关应力。主机电脑将根据FSR 的讯号而执行一系列的计算作业,以取得COP (如图1)。
图1. 负责计算人体足部摆动的程式图区块
大多数的姿势与平衡计量技术,均是主动操作姿势或平衡状态,再计算出人体的反应。在此系统中,我们是让人体于不稳定的支撑表面上保持平衡,达到自我反应的效果。若让人体站在可移动的支撑表面上,亦可达到相同的变数。针对任何测试点,我们的平台可达到不同方向的平衡紊乱(如图2)。
在衔接仪器之后,此平台可随时追踪人体COP 的移动,再显示各种状态下的人体稳定程度。此时如BOSU Balance Trainer 的动态表面就极其重要,可完整补偿姿势控制器统,而模拟动态条件。与仅能模拟静态条件的静态平台相较,动态表面更能呈现病理学方面的问题。
仪器控制
此坚固平台的直径为635 mm,非平面的圆顶直到动态平台之处均为柔软材质(如图2)。另有薄薄一层FSR 排列为阵列,固定于平台之上。我们另于平台之上安装感测器,以捕捉不同的站立姿势,并达到更大的仪控面积(如图2)。此系统好能尽量减少各种限制。