参数名1
参数值1
参数名2
参数值2
参数名3
参数值3
参数名4
参数值4
参数名5
参数值5
参数名6
参数值6
欧地希机器人维修保养信息了解 确认库卡机器人生产工作状况,确认进行常规保养前机器人经过至少超过1个小时停机(换油正常,不被本体温度影响)库卡机器人系统备份,所有库卡机器人在进行常规保养前确认完系统状态后,进行系统备份,(备份体现当前机器人信息)库卡机器人本体型号确认。昆
泰自动化维修机器人型号较为,例如有史陶比尔Staubli机器人TX2-40、TX2-60、TX2-60L、TX2-90、TX2-90L、TX2-90XL、RX160、RX160L、TX200、TX200L、TX340 SH、TS2-40、TS2-60、TS2-80、TS2-100、TS20、TP80、TS240HE、TS260HE、TS280HE、TS2100HE、TX2-60、TX2-60L、TX2-90等等。普通件3-5个工作日可修复IAI控制器PCON-SE-56PI-N-0-0洁净机器人IAI机器人示教器CON-PG-M原装现货全新二手供应维修|产品参数品牌:IAI机器人名称:IAI机器人示教器型CON-PG-M成色:全新/二手数量:长期备有现货价格:电议广州市广科智能技术有限公司,二手工业机器人销售回收中心,是一家资金雄厚的机器人回收公司。的速度,的品质,诚实可靠,价格公道,现金交易!只要你一个电话搞定一切,多年回收经验,看相片就可估价,是国内回收闲置机器人废旧机器人二手机器人、二手机械手二手机器人配件的一家公司!欢迎来公司考察,欢迎来电咨询!发那科伺服器放大器驱动器控制器电源模块伺服电机编码器线路板风扇配件。 结果保存到数据1里,MFRAME由数据1,数据2,数据3的3个数据生成用户坐标,数据1是显示定义点ORG的数据,数据2是显示定义点XX的数据,数据3是显示定义点XY的数据,SETE在数据1的型变数的要素上设定数据2。
维护要求更,发那科机器人控制柜维修,发那科机器人示教器维修,发那科机器人I/O板维修,发那科机器人驱动器维修,发那科机器人伺服电机维修,发那科机器人计算机板维修,发那科机器人电源板维修,发那科机器人安全板维修安川维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那。 三协等,从机器人选型,安装,调试,改造与无忧售后和维保为客户提供全方面服务,实现工业机器人一-站式服务商,产品参数品牌:ABB名称:主板型ACRB-033HNE08250-1成色:全新/二手数量:长期备有现货价格:电议机器人备品服务优势:1.新品提供一年以上保修期。
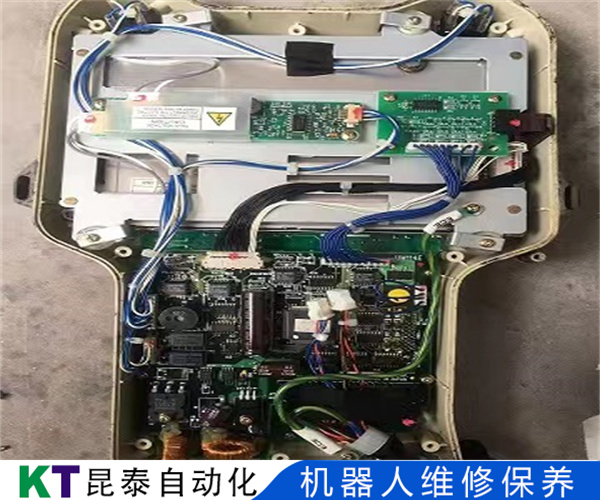
欧地希机器人维修保养信息了解 1、电源问题:电源没有正常连接或电压不稳定可能导致机器人无显示。需要检查电源连接是否正常,确保电源电压稳定。 2、显示屏故障:显示屏本身可能出现问题,如损坏或老化,导致无法正常显示。这种情况下,需要检查显示屏是否正常工作,如有需要,可能需要更换新的显示屏。 3、连接问题:机器人的屏幕通常通过电缆连接到主机,如果电缆接触不良或者损坏,屏幕就无法正常显示。这种情况下,可以尝试重新连接电缆或更换新的电缆。 4、电路板问题:电路板可能存在故障,导致无显示。需要检查电路板是否有短路、断路或其他异常情况,如有问题,需要修复或更换电路板。 5、电池电量不足:电池电量不足,机器人会进入低功耗模式以延长电池寿命,关闭显示屏来节省能量。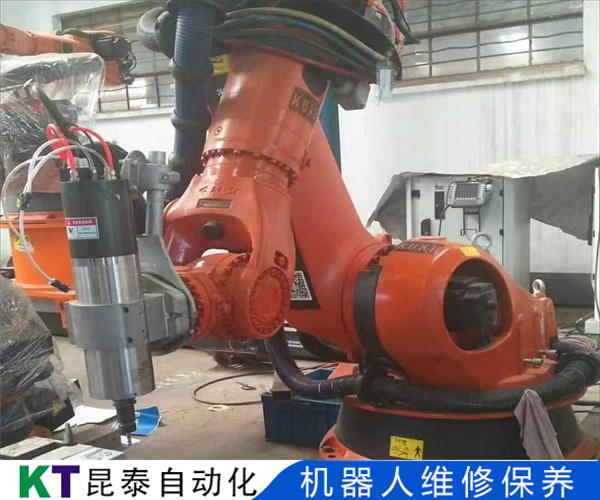
SGDR-C0A080A01B,SGDR-C0A250A01B,SGDR-C0A250A01B,安川首钢MOTOMAN莫托曼机械手轴控制基板SGDR-AXA01A维修,安川电源,安川机器人电源接通顺序基板JANCD-NTU01维修,莫托曼安川机器人维修控制基板JASP-WRCA01B莫托曼安川机器人。安川机器人电路板维修步骤:安川机器人CPS-150F、如果PLC停止在某些输出被激励的地方,一般是处于中间状态,则查找引起步操作发生的信号(输入,定时器,线川,鼓轮控制器等)。编程器会显示那个信号的ON/OFF状态。:新闻IGM机器人K6示教器无法通讯故障维修安川机器人伺服电机故障维修安川机器人伺服电机启动不了维修IGM机器人K6示教器无法通讯故障维修安川机器人伺服电机故障维修安川机器人伺服电机启动不了维修机器人和机械手在工业应用中的区别工业机器人示教方法分析安川Motoman机器人本体维修及标准保养机器人伺服电机维修>机器人伺服电机安装维修需要注意的事项机器人伺服电机维修|安川机器人伺服电机安装需要注意的事项安装:室内。
方法如下三种:.找两张相同的SD内存卡对换测试判断其好坏;或把SD内存卡装载到好的控制柜,然后上电测试判断其好坏。.把SD内存卡插到电脑上看能否正常读写;注意!请勿用电脑将SD内存卡进行格式化,否则将无法修复内存卡(内含ABBbootapplication系统启动引导程序,用于正确重启机器人控制器)。.若SD内存卡损坏,可用RobotStudio尝试对其进行磁盘恢复,若恢复失败需更换新的SD内存卡。1.检查示教器连接线好坏检查示教器连接线有无破损,被重物碾压过的现象。检查示教器接头XS4有无松动、接触不良、针脚是否有氧化掉落等现象。检查控制柜内部连接XS4母座的连接线有无异常,可拿万用表测量通断来判断其好坏。 8.触摸屏是用3M双面胶贴合的,使用热风枪在屏幕四边来回均匀加热(风枪温度控制在80-120°C,出风口距离屏幕25--30mm处),然后用美工刀沿四边慢慢把屏幕分离(是使用钢丝线进行分离);注意。

::60返回操作步骤1.在主菜单中选择投入运行>服务>保养手册。窗口保养手册自动打开。2.选择选项卡保养输入,并填写有关保养的数据。填写所有栏目。3.按下保存。即显示一个安全询问。4.如果所有的数据都正确,是回答安全询问。这些数据就此被保存。如果切换到选项卡保养总览,则在那里显示该项保养。图:保养输入1选择执行了哪一类型的保养。2输入谁执行了保养。3对于由KUKA公司员工执行和记录的保养:填写订单号。对于其它保养:填写任意一个号码。4填写注释。保养类型这些保养类型对应于KUKA保养合同中的保养类型。视所使用的选项(例如:线性轴或工艺程序包)而定,还可能有其它的保养类型供选择。显示保养记录说明所记录的保养可以以一览表的形式显示出来。
欧地希机器人维修保养信息了解 1、机械部件问题:机器人的噪音可能来自于其机械部件,如电机、减速器、传动机构等。如果这些部件的设计或制造存在缺陷,或者在使用过程中出现磨损、松动等情况,都可能导致噪音增大。 2、装配问题:机器人在装配过程中,如果各个部件之间的配合不紧密或者装配不当,也可能导致噪音的产生。例如,轴承与轴之间的配合间隙过大或过小,都可能导致运转时产生噪音。 3、工作环境问题:机器人在工作过程中,如果周围环境存在灰尘、污垢等杂质,这些杂质可能进入机器人的内部,导致机械部件的磨损加剧,从而产生噪音。此外,如果机器人工作的环境温度过高或过低,也可能对机械部件产生影响,导致噪音增大。 4、电源问题:机器人的电源问题也可能导致噪音的产生。例如,电源电压不稳定、电源线路接触不良等,都可能导致机器人运转时产生噪音。 则按下TouchUp键,以便重新计算和保存,7.用软键指令OK存储变更,注意:如果帧参数发生变化,也重新测试程序是否会发生碰撞,更改更改机器人的操作步骤:1.运行方式T1,将光标放在要改变的指令行里。 蓝屏,花屏,屏上出现条纹等维修,免费检测,上门维修,有测试平台,测试好交货看公司维修实例,请下拉常见维修产品及故障现象:1.触摸屏,人机界面,控制面板常见故障现象有:通电不显示,触摸屏不灵,触摸后鼠标跑偏。

大多数机器人都存在边角切割的问题,ABB装配机器人IRB1600机器人采用了特的“大脑与“肌肉组合,无论速度多快,都能确保作业路径始终如一,出色的可靠性ABB装配机器人IRB1600具有出色的可靠性。ABB机器人外部轴电路板|ABB外部轴主板,ABB机器人驱动器主板电路板维修,ABB机器人串行测量SMB主板维修,ABB机器人示教盒|示教器主板电路板维修,ABB机器人安全板|安全链板,ABB机器人控制柜IO板,ABB机器人控制基板,ABB机器人通讯板,ABB机器人电源分配板,ABB机器人N2VICENET总线电路板等主板电路板维修。拥有工业ABB机器人检测设备以及的主板电路板IC测试仪器,可在线测试集成器件;对可编程器件进行储存,烧录,解密和修改;维修设备种类多,经验丰富,维修产品修复率。承接以下ABB机器人配件维修:ABB机器人主计算机电路板DSQC325ABB机器人I/O主板DSQC327AABB安全检测板DSQC504ABB机器人I/O主板DSQC328A安全检测板DSQC5093HAC5687-1SMB电池3HAC16831-1ABB机器人电路板DSQC5403HAC14279-1电路板DSQC532B3HAC023447-1/01电路板DSQC503A3HAC18159-1电机伺服卡DSQC236d电机伺服卡。
不存在空气老化特性和低温脆性,对于使用环境比较恶劣,或者是北方冬天供暖措施不足的工况环境下SDP的寿命会更好,但SDP防磨布存在光老化,同时也和波纹管一样会因与机器人或管线包的支架、法兰之间的接触产生磨损,因此防磨布也被定义为易损件。波纹管的磨损可使用摩擦球防护防磨布的破损图调试使用调试方面,CPP塑料保护套会因管线盒和波纹管的体积大,不贴服机器人,故管线包的干涉空间较大,调试难度大,6轴网球拍的安装可调节,需要仿真工程师和调试工程师根据实际的轨迹需求对管线包的安装和轨迹进行调整,逐渐找到管线包的理想状态,该过程对仿真和调试要求较高,需要考虑达到点位需求,还要考虑管线包的状态,避免管线早损坏。
TgEfOguVtKf












