在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度坏的转速控制动静态特性至关重要。为寻求测量精度与系统成本的平衡,一般采用增 量式光电编码器作为测速传感器,与其对应的常用测速方法为M/测速法。M测速法里然具有-定的测星精度和较宽的测量范围,但这种方法有其固有的缺陷,主要包括:1)测速周期内检测到至少-个完整的码盘脉冲,限制了低可测转速:2)用于测速的2个控制系统定时器开关难以严格保持同步,在速度变化较大的测量场合中无法测速精度。因此应用该测速法的传统速度环设计方案难以提高伺服驱动器速度跟随与控制性能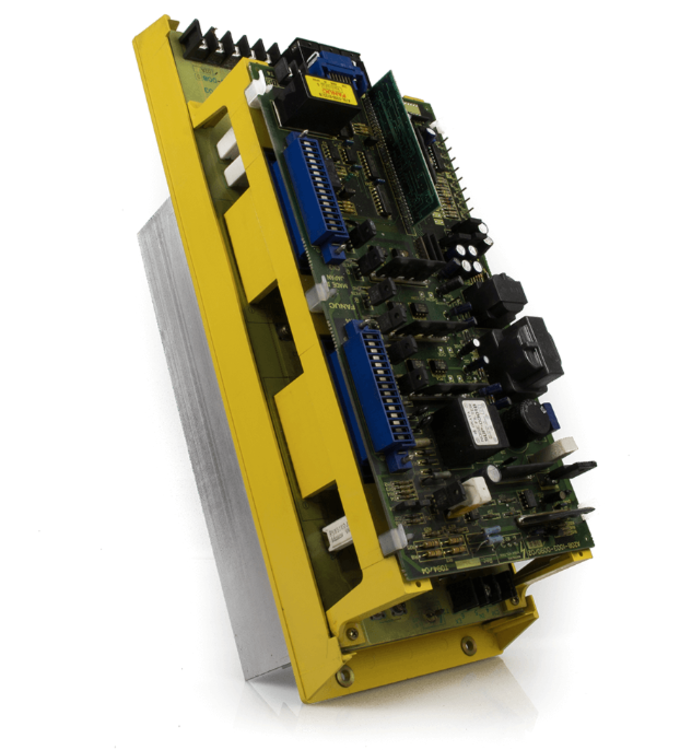
伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是-种补助马达间接变速装置。
伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,具有机电时间常数小线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为植流和交流伺服电动机两大类,主要特点是,当信号电压为零时无自转现象, 转速随着转矩的增加而匀速下降。
PLC输入、输出模块的种类:数字输入Dl,数字输出DO,模拟量输入AI,模拟量输出AO。数字的输入输出一般都是24V的.模拟量的2类4种量,2类分别是电压型和电流型电压型有0-10V和-10到10V.电流型主要有4-20MA,0- 20MA.然后模块再通过A/D转换把模拟量转换成+ 32767~-32768之间的数然后再实行控制。 信号模板的作用是把各种过程i/o信号进行转换把输入的各种信号转换成数字量便于pl识别,处理和分析把输出转换成模拟给各种调节机构去执行或将输出转换成2位式do量,去控制一些设备如启动停止、接通和断开等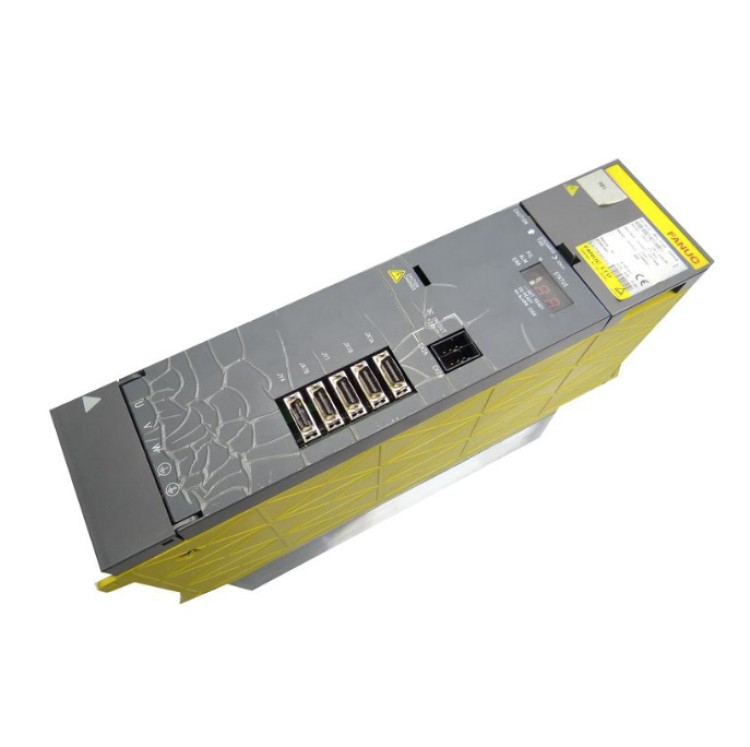
控制系统已被广泛应用于人类社会的各个领域。在工业方面,对于冶金、化工、机械制造等生产过程中遇到的各种物理量,包括温度、流温、励、厚度张勃、速度、位置、频率、相位等,都有相应的控制系统。在此基础上通过采用数字计算机还建立起了控制性能更好和自动化程度更高的数字控制系统,以及具有控制与管理双重功能的过程控制系统。在农业方面的应用包括水位自动控制系统、农业机械的自动操作系统等。
实际的DCS操作站是典型的计算机,它与控制站不同,有着丰富的外围设备和人机界面。在人机界面方面,逐渐过渡为以GU图形用户界面为平台并采用鼠标,组态时制作流程图和控制回路图等采用菜单、窗口等,使人机界面友好。第三代DCS操作站是在个人计算机(PC) 及Windows操作系统普及和通用监控图形软件已商品化的基础上诞生的。DDE或OPC接口技术,以太网接口与管理网络相连。DCS系统组态、操作站组态、控制站组态均有相应软件,为DCS用户的工程设计人员提供人机界面。有的DCS的采用通用监控图形软件,或以此类软件为核心,进行_次开发。因为数据通信标准牵涉到网络结构、通信介质(信道)、 通信协议、 IEEE802 4令牌总线传输方式和IEEE802.5令牌环网传输方式的通信协议在DCS系统中应用广, 是否能够成为今后DCS的通讯标准,还有待观察。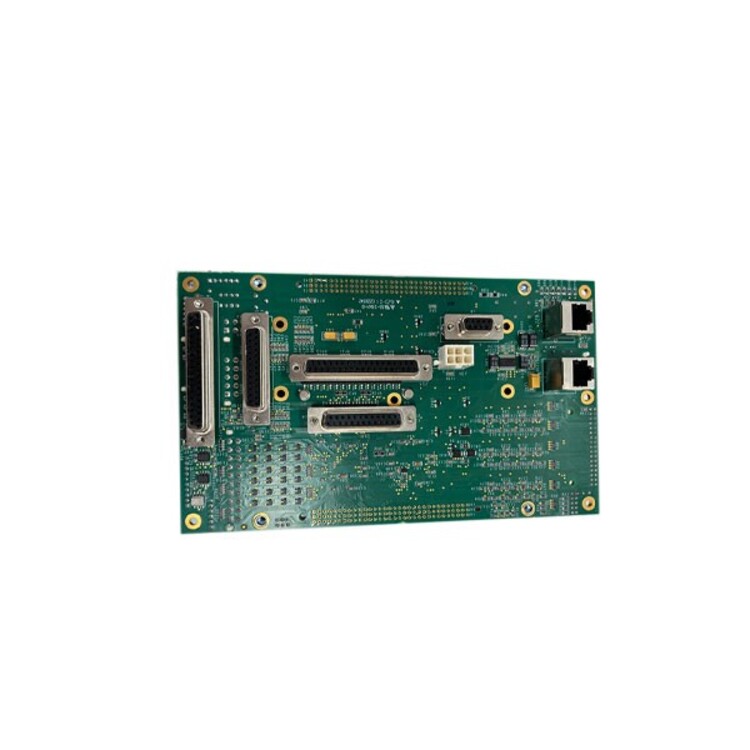
系统软件可以完成离线组态及在线修改控制策略。为了完成控制策略,对于顺序控制和批量控制组态编程,各种DCS控制站采用不同的方法。
工程师功能、通信功能和语言功能等,其中工程师功能中包括系统组态、系统维护、系统通用(itiliy) 功能,还有系统配置、操作标记、 趋势记录、历史数据管理、
总貌画面组态、控制站组态、工艺单元或区域组态等。












