路斯特LUST伺服驱动器不显示维修 主板故障 我不是写评论的人,但我想如果它在一年内运行良好,我会购买第二个,那么值得发表正面评价,发件人:大卫|20/11/2020这篇评论有帮助吗,是否(0/0)5hp伺服驱动器安装制动电阻器可以安装在您的5hp单相到三相伺服驱动器上吗。
伺服驱动器出现各种故障问题可以根据主要报警代码来判断是哪里的问题,例如安川驱动器报b31、b32、b33、A.F10、A.51、A.510、A32、A.40、A400、A40、A320、A.32、A.10、A.30、A.31、A.81、A.82、A.83、A.84、A.85、A.A1、A.31、A.71、A.72、CPF00、CPF01、A.C9、A03、ABF等故障代码。 交流感应电机,两相和三相步进电机,音圈等等,我们称它们为伺服驱动器,我们坚持使用它,伺服驱动器是电机控制器吗,这是一个棘手的问题,是的,伺服驱动器确实为电机提供了控制元素,如果没有电机驱动,您将失去控制。 这种坚固的机械结构适用于为青少年患者设计的胰岛素泵,[的剂量是胰岛素泵的一个关键特性",德昌电机的战略营销副总裁JimDick说,[这个微型驱动平台专为胰岛素泵的稳健性和安全性而设计,"他补充说。
在这种状态下,设备操作员可以手动移动和操作设备,而不受电机的干扰,重要的是要注意,只有在自然惯性允许的情况下,STO才会发生,从紧急停止功能到门联锁系统,实现STO的方法有很多种,但大多数情况下,您的STO电路将包含自己的接近开关以协助其功能。研究总监开发偏心、摆动以及伺服系统如何帮助解决偏心、摆动、“有牛奶吗?”乳品厂面临的挑战降低计划中的风险降低计划中的风险采用AKD的ModbusTCP与现场总线相比采用AKD的ModbusTCP与现场总线相比实现任务的动议由于高环境温度导致电机降额由于高环境温度导致电机降级机器人电机:你真的吗需要妥协?NDC解决方案——有利可图的合作伙伴关系新食品安全法规:预防性控制审查扩展新食品安全法规:预防性控制审查扩展从伺服技术中获益的新的和有趣的应用从伺服技术中获益的新的和有趣的应用使用科尔摩根的新工具优化您的步进电机解决方案使用科尔摩根的新工具优化您的步进电机解决方案克服设计的局限性推动高-加速水流动包装机在技术的实现想法减少缺陷。
路斯特LUST伺服驱动器不显示维修 主板故障 1、排除机械问题:检查伺服驱动器所连接的机械部件,确保它们没有卡住、损坏或过于紧固。这可能包括检查传动系统、轴承和联轴器等。 2、检查载荷:确保负载处于伺服驱动器可承受的范围内。过大的负载或持续的过载可能导致伺服驱动器的过载问题。 3、温度检测:检查伺服驱动器的温度传感器,确保它没有过热。过热可能是由于环境温度、通风不良或者驱动器内部散热不良造成。 4、电气系统检查:检查伺服驱动器的电气连接,包括供电电压、电流和接地状态。确保电气系统工作正常,没有短路或接地问题。 5、软件调整:如果是参数或控制软件不当导致的过载问题,可以通过调整伺服驱动器的参数或控制软件来解决。 6、维修或替换:如果以上步骤中没有找到问题,可能需要将伺服驱动器送到维修机构进行维修或更换有问题的部件。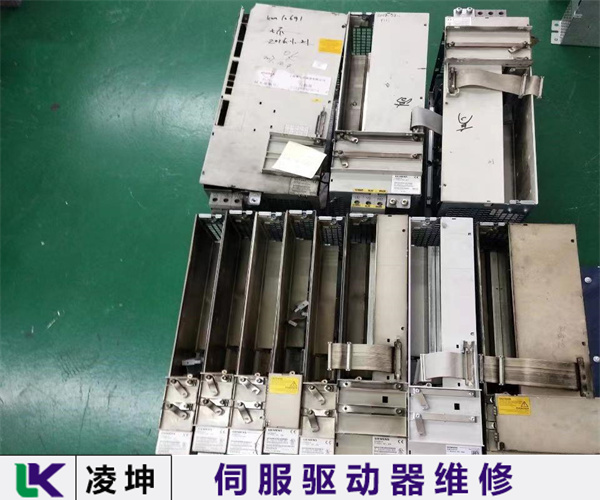
比例项仅在出现误差时才有用,同样,积分项乘以随时间推移的误差总和,以生成积分器对输出的贡献,换句话说,积分项需要时间来建立,这阻碍了系统的响应能力,前馈控制不是被动的,而是主动的,它根据预测误差向控制回路中注入命令。 科尔摩根还将展示其运动系统,组件和服务系列,科尔摩根展台将提供大量现场演示,包括为参观者提供互动实践机会,以展示运动和自动化技术的性能,科尔摩根归档下:控制,驱动器+供应,特色,电机与:KollmorgenReader互动伺服驱动器/使用AKD™更快地构建更紧凑。
约翰让我与纽约珠江InlandMotor的JohnLuneau取得联系。”“一位工程师,ArtHess和我去了珠江,发现InlandMotor位于一个由附属车库组成的综合体中,而JohnLuneau则位于一间简陋的办公室。很快,我们就有了一个设计和建议,可以满足我们对替代复杂且昂贵的高速电机驱动设计的需求。原型工作得很好。”“长篇短篇;我们将所有三个合同合并为一个合同,称为8B型合同。对加速交付感到高兴和迫切。不仅我们的生产设施达到了极限,而且内陆的生产设施也达到了极限。Kollmorgen拥有帮助Inland的资源,并且很快就发现联手将使双方受益。”“因此Inland成为不断扩大的Kollmorgen集团的一个部门。 机器人,自动化,航天,和其他行业的工程师应该得到一个紧凑的驱动解决方案,使他们的工作更轻松,无论是需要减轻重量的AGV还是关节空间有限的协作机器人手臂,FlexPro都可以让工程师满足在不影响功率和性能的情况下限制机械设计。
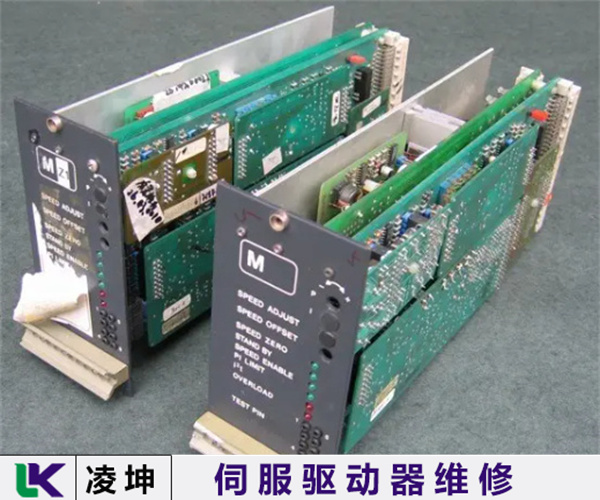
 路斯特LUST伺服驱动器不显示维修 主板故障 1、过载:过载是常见的原因之一。当伺服驱动器承受超出额定负载的负荷时,会导致电流过大而触发过电流故障。 2、短路:电机内部的短路可能导致过电流。这可能是由于电机绕组之间的短路或绕组与电机外壳之间的短路引起的。 3、电源问题:供电电压不稳定、过电压或欠电压都可能导致伺服驱动器出现过电流故障。 4、过热:如果伺服驱动器内部或附近的某些部件过热,它可能会导致电流过大以及触发过电流保护功能。 5、故障元件:伺服驱动器内部的电子元件或电路可能出现故障,导致电流异常。 6、参数错误:错误的参数可能导致伺服驱动器工作在不恰当的条件下,引发过电流故障。
路斯特LUST伺服驱动器不显示维修 主板故障 1、过载:过载是常见的原因之一。当伺服驱动器承受超出额定负载的负荷时,会导致电流过大而触发过电流故障。 2、短路:电机内部的短路可能导致过电流。这可能是由于电机绕组之间的短路或绕组与电机外壳之间的短路引起的。 3、电源问题:供电电压不稳定、过电压或欠电压都可能导致伺服驱动器出现过电流故障。 4、过热:如果伺服驱动器内部或附近的某些部件过热,它可能会导致电流过大以及触发过电流保护功能。 5、故障元件:伺服驱动器内部的电子元件或电路可能出现故障,导致电流异常。 6、参数错误:错误的参数可能导致伺服驱动器工作在不恰当的条件下,引发过电流故障。 所有这一切都可以通过装在口袋里的伺服驱动器来实现,ESIMotion为农业等工业应用设计了伺服驱动系统,两个这样的伺服驱动器是Atom和Mite系列,ESIMotion的Atom是一种超轻型,紧凑型伺服驱动系统。
这意味着它们能够承受各种条件,虽然大多数人认为伺服驱动器用于机器人技术和数控系统加工工具,但伺服驱动器还应用于许多极端,通信和水下应用,您在整个行业中发现的许多现成产品并非针对这些恶劣条件而设计。甚至更高的动态性能是可行的。在这里,以几百毫米/秒的速度加速到4g是可能的。特殊设计包括零磨损的挠性导轨和接头,省去了滚动或摩擦元件。结果是零背隙运动,没有传统机械轴承引起的振动噪音。从机械导向系统传输的不需要的频率分量不会影响测量。具有动态hexpaods的多轴模式运动生成软件可用于Windows、Linux和OSX。当需要纳米级精度和kHz范围内的带宽时,基于压电的六足设计是一个合适的选择。节省空间的行运动学设计实现了薄型和小尺寸,开辟了超精密加工应用,其中六足位移台以纳米精度实时补偿导向误差。压电驱动器无磨损,还可在强磁场或高真空下运行。用于图像分辨率增强/像素亚步进的压电扫描仪在低光照条件下对从天文学到显微镜的成像应用提出了挑战。
我们在FlexPro驱动器系列中出现的款产品,它为机器和机器人设计人员的设计提供了更大的灵活性,尤其是那些想要利用FlexPro伺服驱动器的紧凑性但又不想旋转配合电路板的设计人员,顾名思义,机器嵌入式伺服驱动器非常适合机器应用空间可能有限的地方。是四舍五入计算:33,000英尺-磅/分钟/2π弧度/转。据说,标准值为33,000ft-lb/minute大约在1783年由JamesWatt和MatthewBoulton根据啤酒厂马的估计输出建立,因为有1.35582Nm/ft-lb,公制等效方程为:伺服电机定义的马力(hp)在选择伺服电机时,目录数据表主要用作比较连续和/或峰值能力的相对编号,因为大多数应用需要了解所需的工作扭矩和速度。如果您对此有任何疑问,请告诉我们或任何其他运动主题!关于作者该博客是Kollmorgen运动和自动化团队的协作成果,其中包括工程师、客户服务和设计。无论您在项目中的哪个阶段,我们都会为您提供帮助。咨询了解更多AKM家族我们的。
它会吸引转子的北极,然后,当驱动器为B通电并关闭A时,转子旋转90°,并且随着驱动器一次为一个磁极通电而继续进行,工程师很少使用波驱动:它效率低且提供的扭矩很小,因为一次只有一个电机相接合,双相驱动有其名称。
LoHyvFbHrGv