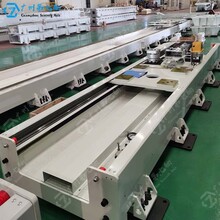
机器人地轨作为机器人的行走辅助机构,具有控制方便、执行动作灵活、可以实现复杂空间轨迹控制的特点。它能够按照设定的操作程序自动操作,或者在手动模式下立操作。此外,地轨还具有定位、高抗干扰能力、高可靠性、大负载等特点,能够适应各种复杂的应用场景。
机器人地轨的应用范围非常广泛,可以应用于工业自动化生产线上的各个环节,如装配、搬运、焊接、喷涂、检测等。机器人地轨能够提高生产效率,降低生产成本,提高产品质量和稳定性,实现生产过程的自动化和智能化。
机器人地轨适用于机床工件上下料、焊接、装配、喷涂、检验、铸造、锻压、热处理、金属切削加工、搬运、码垛等工作,一个机器人行走系统可以实现多工位搬运,一台机器人能够与多台加工中心实现自动化加工流程。用户使用工业机器人地轨能够有效节约成本,提高机器人的工作效率,是一种能够实现多工位搬运的行走系统。
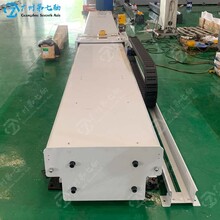
机器人地轨的外部采用防腐蚀设计,内部的设计强度较高,即可以抵御外力,也可防尘土以及工业粉尘等。适用于多种污染型行业,如涂胶行业、点焊行业、工矿行业等应用。
机器人地轨的结构设计优化,在日常维护时更加简单,既可以节省维护费用,也可提高维护效率,而且机器人地轨的维修维护频率也相对较低。
在某些工厂的生产作业中,有些工位工作周期很长,这时如果一个工位采用一台机器人进行管理,需要的机器人数量就会很大,会造成生产成本过高,这种情况如果给机器人添加外部行走轴——机器人地轨,让机器人管理完一个工位再跑到另外一个工位进行管理,这样一台机器人加一条机器人地轨就可以把所有工位管理好,大大节省了生产成本,实现了工厂柔性化智能化管理。