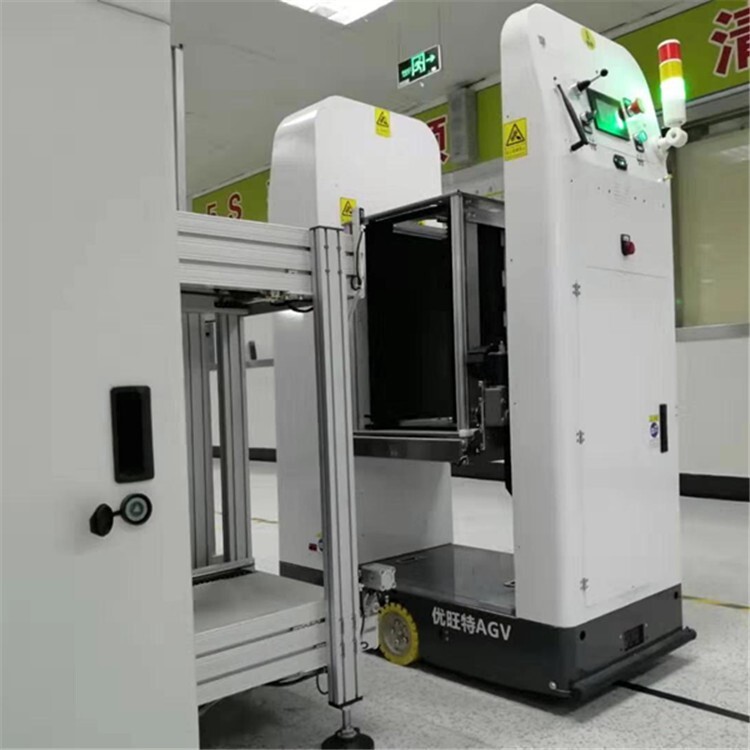
行驶方式前进后退通信方式串口、WIFI(2.4/5G)驱动方式差速、舵轮、麦轮供电能源锂电池组安全防护激光避障导航方式磁条、二维码、激光负载重量0-5000KG控制方式单片机爬坡性能3-5°
20世纪70年代中期,由于负载AGV的引入,AGV产业得到了次较大的发展。由于这些负载AGV能够为物料处理领域提供多功能的服务而被广泛接受,例如工厂里的工作站台,传送设备,以及控制系统和信息系统之间的连接等。已经有许多厂家制造的几百个负载AGV系统运转着。这些 AGV系统在仓库、工厂、作坊、医院以及其它工商业领域中得到了广泛的运用。

.智能地面和dumb小车
20世纪70年代,基本的导引技术是靠感应埋在地下的导线产生的电磁频率。通过一个叫做“地面控制器”的设备打开或关闭导线中的频率,从而指引AGV沿着预定的路径行驶。由于AGV只是沿着地面上的信号行驶,所以被称为“dumb”,而AGV行驶的路径是由智能的地面控制器决定的,因此,这一时期的系统被称为“智能地面”和“dumb小车”。

随着电子技术和微处理器技术的不断发展,AGV的应用也越发广泛。AGV变得更加智能化,而路径却没有以前那么复杂了。其中,死估算的发展是主要的突破之一。死估算这一术语描述的是AGV自主在地面行驶的能力。死估算的大优点是在交叉点不需要沿着AGV的转弯半径开槽,AGV可以离开导线,按照程序中设定的半径转弯,然后再继续沿着导线行走。这样,虽然在地面上仍然需要埋设多条导线,但是导线的安装却非常简单了。

AGV的应用从初的传统式定向配送,迅猛地发展到拥有机器人接口的、由复杂的计算机控制的汽车装配线领域。AGV能够成为一个立的系统,也可以集成到其它系统中,或者成为各个相对立的自动化生产区之间的纽带。初的AGV只用于在水平方向上搬运放在托盘上的物料,而对于AGV的设计和应用已经像工业机器人一样多种多样了。
优点
自动化程度高
由计算机,电控设备,磁气感应SENSOR,激光反射板等控制。
当车间某一环节需要辅料时,由工作人员向计算机终端输入相关信息,计算机终端再将信息发送到中央控制室,由的技术人员向计算机发出指令,在电控设备的合作下,这一指令终被AGV接受并执行——将辅料送至相应地点。

充电自动化
当AGV小车的电量即将耗尽时,它会向系统发出请求指令,请求充电(一般技术人员会事先设置好一个值),在系统允许后自动到充电的地方“排队”充电。
另外,AGV小车的电池寿命很长(2年以上),并且每充电15分钟可工作4h左右。

提高企业形象
AGV美观,可观赏度高,从而提高企业的形象。
方便,减少占地面积
生产车间的AGV小车可以在各个车间穿梭往复。

仓储业是AGV早应用的场所。1954年世界上首台AGV在美国的South Carolina州的Mercury Motor Freight公司的仓库内投入运营,用于实现出入库货物的自动搬运。世界上约有2万台各种各样AGV运行在2100座大大小小仓库中。海尔集团于2000年投产运行的开发区立体仓库中,9台AGV组成了一个柔性的库内自动搬运系统,成功地完成了每天23400的出入库货物和零部件的搬运任务。

在邮局、图书馆、码头和机场等场合,物品的运送存在着作业量变化大,动态性强,作业流程经常调整,以及搬运作业过程单一等特点,AGV的并行作业、自动化、智能化和柔性化的特性能够很好的满足上式场合的搬运要求。瑞典于1983年在大斯得哥尔摩邮局、日本于1988年在东京多摩邮局、中国在1990年于上海邮政枢纽开始使用AGV,完成邮品的搬运工作。在荷兰鹿特丹港口,50辆称为“yard tractors”的AGV完成集装箱从船边运送到几百码以外的仓库这一重复性工作。











