密码找回
账号找回
删除信息
常见问题
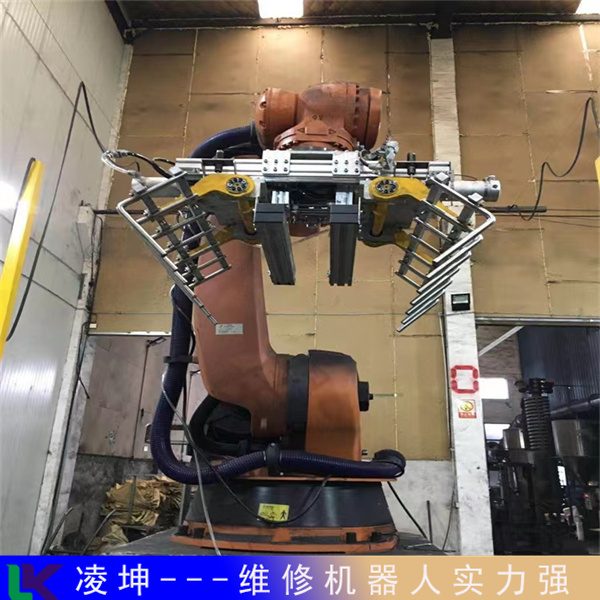
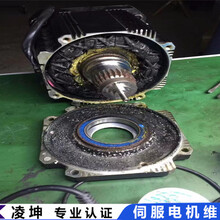
siemens伺服电机编码器短路维修心里
LS力矩电机维修距离近
欧姆龙R88M-G6K010H-S2-Z伺服电机维修周边可上门
infranor伺服电机抖动维修故障代码维修技术
2年
微信在线
13961122002 3228134024
收藏siemens增量式编码器维修一对一咨询
¥498
三菱DD马达不转维修不限品牌故障
BAUMER堡盟增量式编码器损坏维修免费故障检测
艾威图伺服电机抖动维修跳闸故障维修实力强
伦茨Lenze伺服电机报警维修窜动现象维修规模大
海德汉伺服编码器磨损维修当天精修