晶圆升降机构中的真空吸附系统是用来吸附和释放品圆,从而进行晶圆的检测和传输,以便实现传输的。机构要求晶圆定位精度高,真空吸附系统在吸附和释放晶圆过程中尽量减小冲击,要求吸附的时候应当缓慢地增加或减小真空压力,使得压力变化为斜坡变化,大限度减小晶圆在真空吸附下精度的损失。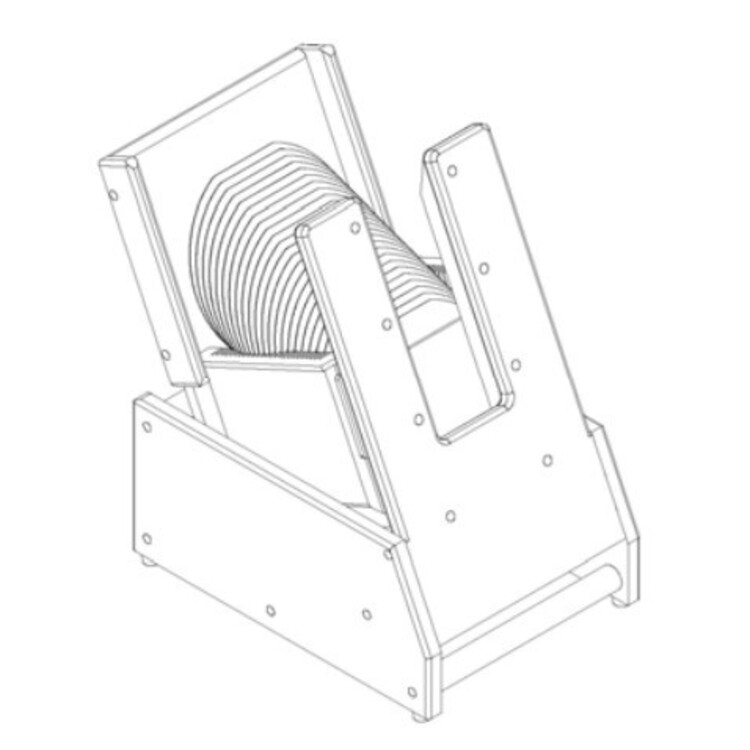
晶圆上表面有定位用的标识,晶圆在预对准阶段确定好了与传输机械手的相对位置,经过升降机构到达工件台吸盘上,为了检测标识位需要其与吸盘相对位置是固定的。因此要求升降机构在圆周方向上不存在转动。同时光栅传感器安装要求光栅尺与读数头相对位置在+0.1mm。防转装置能机构运动圆周方向相对位置,晶圆传输的精度。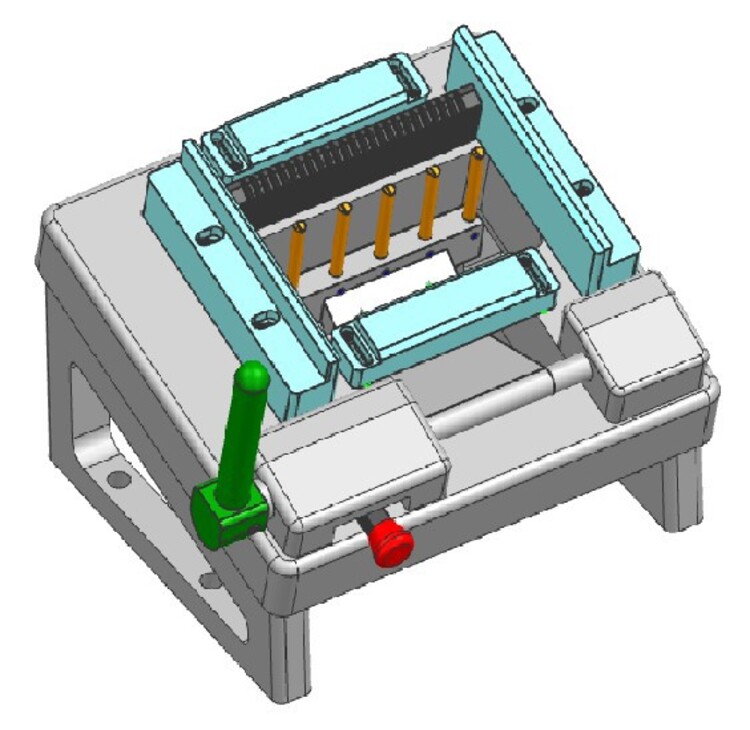
晶圆升降装置,包括静电卡盘及位于静电卡盘下方的多个升降组件,静电卡盘上放置有一晶圆,每个升降组件均包括驱动单元、位移监测单元及顶针,驱动单元与顶针连接并驱动顶针上升或下降以顶起或远离晶圆,位移监测单元位于驱动单元上,并用于监测顶针上升或下降的高度并反馈给驱动单元。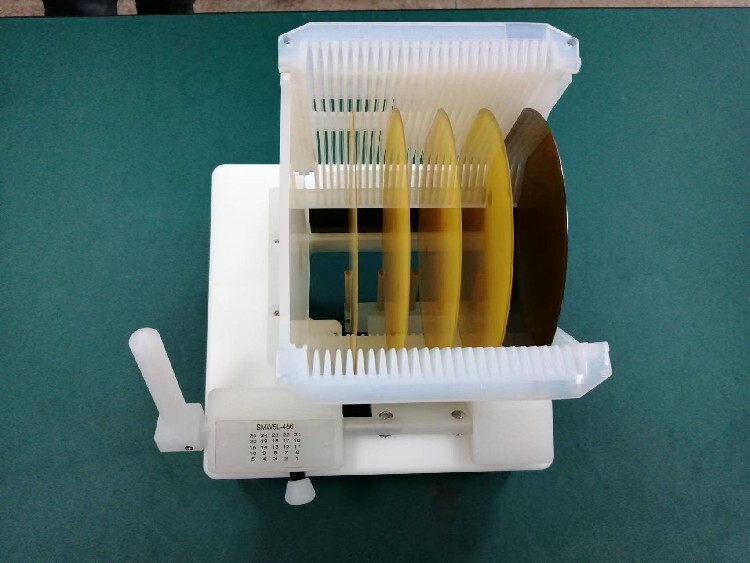
目前,半导体制程设备中,常常需要用电机通过传动带带动滚珠丝杆,来控制晶圆的升降。而传动带通过摩擦来传递动力,因此传动带要调整张紧力以获得合适的摩擦力。通过调整传动带的张紧度可以调整传动带和齿轮之间的摩擦力,传动带的张紧度可通过调节电机位置进行调整。另外传动带过紧会使传动带磨损严重,过松则易产生打滑现象,使传动带严重磨损甚至烧坏。
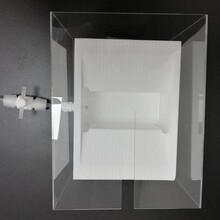
晶圆生产过程中,需要采用多种工艺进行处理。处理工艺多是在设备内进行。如润湿处理,需在润湿槽内进行。电镀需要在电镀槽内进行。而现有技术中,将湿晶圆放入或取出处理装置的一系列工序都需人工操作,一方面会降低生产效率,提高生产成本,另一方面也会因人工操作不当导致晶圆的损坏,降低生产合格率。同时,人工操作所需空间大,空间利用率低。人工操作的另一个弊端是劳动强度大,效率低,无法满足大规模生产的需要。人工操作还会导致工人接触电镀液或润湿液而危害工人身体健康。
随着制造工艺的进步,所加工的硅片直径越来越大,而器件特征尺寸在不断缩小,单位面积上能够容纳的集成电路数量剧增,成品率显著提高,单位产品的成本大幅度降低,可靠性等性能指标显著提升,促进了大生产的规模化。