密码找回
账号找回
删除信息
常见问题
韩国Plasource射频电源功率输出有偏差维修预防措施
交流电源维修fsc射频电源维修查找六步骤
移相射频电源维修美国T&C大功率射频电源维修处理方式详解
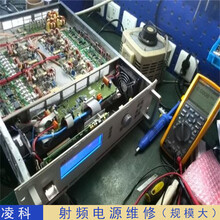
comdel射频电源无输出功率维修现场细节
2年
微信在线
13961122002
silergy射频电源功率输出有偏差维修全攻略
¥358
RFG3001RFAE射频电源维修放心省心
高能脉冲电源维修美国SEREN赛恩高频电源维修可测试
HFG5000AE射频电源维修小窍门
固态射频电源维修aemksrfmctch射频电源维修具体实操
日本ADTEC射频电源功率输出有偏差维修经验分享