装车操作
1.操作人员在操作前,应手握触电棒,消除人体带电。
2.打开四个鹤位的装车阀门。
3.通知岗位启泵,控制好流速,每辆车速应大变小,防止同时装满。
4.快装满时打开第五辆车装车阀门,液位达到规定位置后,关闭阀门,循序操作。
5.期间要加强同司泵岗联系,及时调整流量。
6.全部装完后,检查无误后,确认没有需要补装的槽车,打开鹤管放空阀,收起鹤管。
顶部装车鹤管的部件介绍:
1.立柱:
为使管道受力合理化,用于支承臂的重量,分散旋转接头载荷,安装稳固。
立柱与栈桥装配时可以采用螺栓连接或焊接。
2.内臂锁紧:
用于在臂在收容位置时,将臂锁紧在该位置,这样可以防止因为大风环境或因非操作人员操作而使臂或周围建筑受损。
3.接口:
是臂与管线的连接部分,一般接口与管线之间采用法兰连接。
4.旋转接头
用于臂的旋转运动,满足正常使用范围(包络范围),常规鹤管采用4只或5只旋转接头,以实现运动及法兰接口的对接。
6.内臂:
连接接口与外臂之间的部分,可在水平面上回转。
7.外臂:
为鹤管的主体部分,可以实现一定范围的回转。
8.气相管(AL1412型):
采用与鹤管的相似的结构形式,导出挥发的气体介质。
9.垂管:实现装卸臂伸入槽车内,铝合金垂管克服了钢质材料与罐车碰撞可能产生的危害。
10.密封帽:
采用耐油橡胶制作的锥形帽,装于垂管上端,阻止油气从槽车口逸出。
11.平衡系统:
用以平衡外臂及垂管的重量(臂内无介质平衡),这样使得臂操作灵活、轻巧。平衡系统为弹簧缸,缸内弹簧为压缩弹簧。
12. 短路阀:真空短路阀确保残余介质从鹤管中排空。
13. 高液位声光报警器(可选):
液位探头安装在垂管头部,当槽车内液体介质接近罐口时提醒操作人员关闭阀门,可与控制电液阀联动。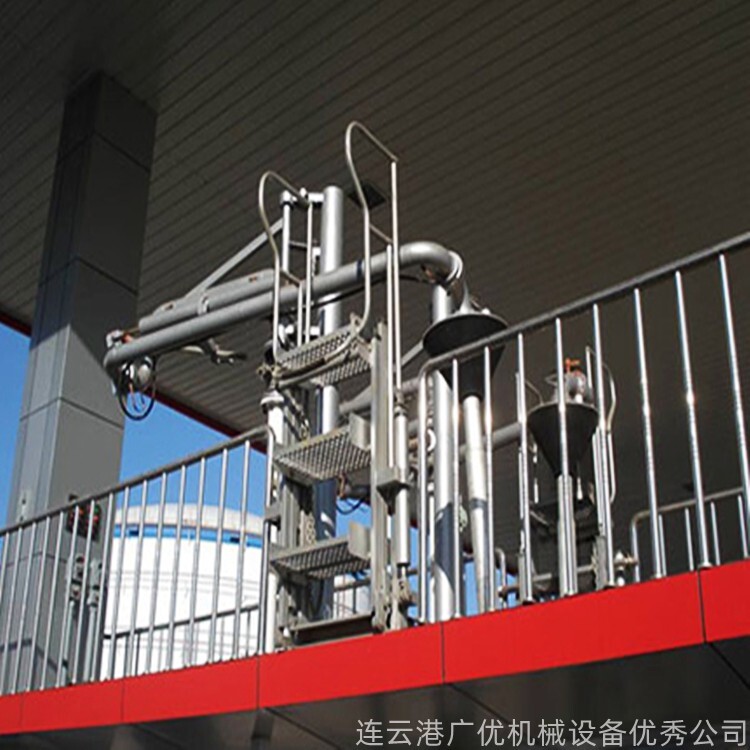
装汽车鹤管在作业完毕后记得将鹤管推到发油台的一侧并使平衡器处于放松状态。应注意要使用均匀的力度来牵引鹤管,避免发生撞击。装车鹤管作业完毕后内臂收到锁紧位置,外臂应停靠于立柱挂钩上。



