机器人半封闭地轨是通过它的控制系统来控制机器人的移动的,机器人安装在行走轴的滑座上,通过控制系统按照路线移动。机器人的移动就是行走轴上机械手移动小车的直线方向上的移动,通过操作和显示屏进行编辑,在有效行程范围内,基本速度在1.2m-1.8m之间,可按客户要求调试。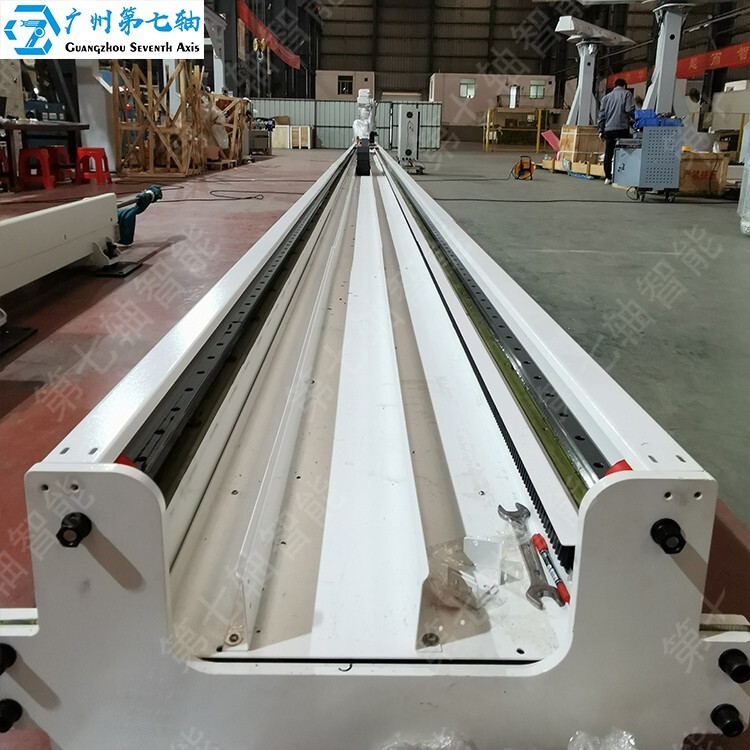
机器人半封闭地轨的精度是由编码器的无误检测再通过伺服系统控制电机来实现,精度在±0.05mm范围内。机器人与行走轴的信号接口及机械行系统接口使用数字信号进行传输,可以其稳定性和可靠性。
机器人半封闭地轨在工业中常见的类型就有地面行走轴、侧面行走轴、底挂行走轴、高架行走轴四种。
1.地面行走轴:在工业生产中有全封闭和半封闭式。地轨负载分为重型和轻型,主要是从事上下料、搬运、码垛工作。
2.侧面行走轴:关节机器人侧挂行走轨道,这种负载较轻,在机器人焊接、喷涂、汽车行业较为常见。
3.底挂行走轴:这种一般是机器人倒挂在行走轴的轨道,在五金制造、磨具行业较为常见。
4.高架行走轴:这种需要机器人到高空作业的行走轨道,行业内叫天轨,是根据企业用户需求定制,一般用在大型的金色制品,例如油缸、滚筒、打磨抛光工作站。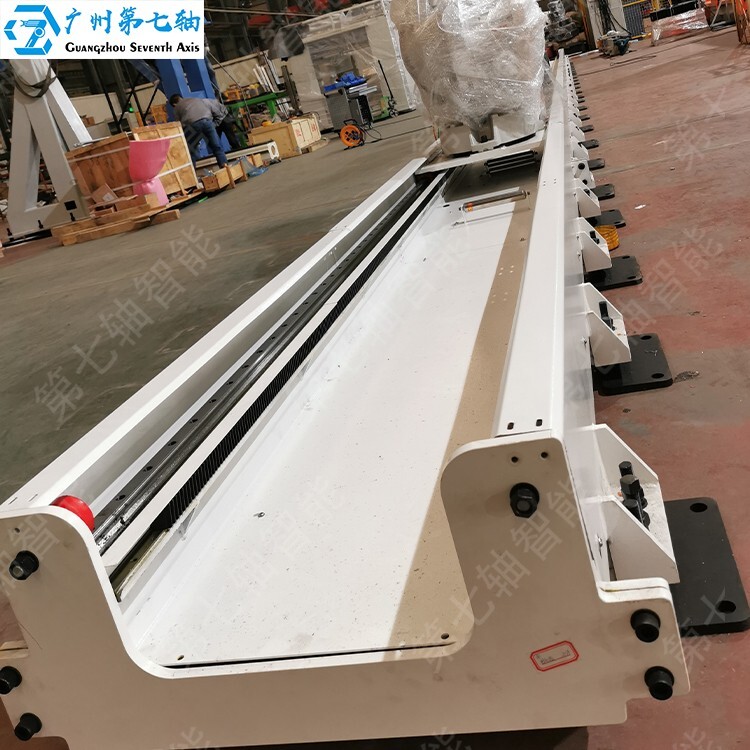
机器人半封闭地轨的几大特点
1.多自由度,每个运动自由度之间的空间夹角为直角。
2.自动控制的,可以重复编程,所有的运动均按程序运行。
3.高可靠性、高速度、。
4.可用于恶劣的环境,可以长期工作,便于操作维修。
5.各个机器人地轨均可采用滚轮导轨,具有可高速运行,安装调试方便,适合长行程应用。
6.伺服马达控制,通过精度减速机、重载滚轮导轨齿轮条进行传动,重复精度高。
机器人半封闭地轨安装注意事项
1.在安装机器人半封闭地轨的时候,我们要注意其应用的环境情况。
2.安装时的地面要坚固,不能高低不平或者杂乱。在此外空间也有要求,需要有足够的空间来运行。
机器人半封闭地轨基础组件的特点
1.基座:机器人行走轴基座有焊接型和铸铁型两处,焊接适合负载比较轻的场合,铸铁适合负载重的场合。
2.滚轮导轨:矩形滚轮导轨+矩形齿条滚轮导轨(导轨上直接+工齿条成为一体式齿条导轨)传动式机器人行走轴系统。
3.齿轮:齿轮组件,带有回差调节机构,方便调整齿轮和齿条之间的啮合间隙。采用这种齿轮组件,将使齿轮齿条传动机构的设计和装配变得简单,实现齿轮齿条传动系统的自动润滑,延长机器人第七轴的使用寿命,降低故障率。












