动平衡测量中三个重要要求
4.1、转速传感器的安装
4.1.1、使用光电转速传感器时,应先在转轴上作好光电标记,作为零相位。光电标记通常用白色双面胶纸作为反光纸。反光纸与被测物体的颜色反差越大,测量结果越好。如反差不明显,建议以涂刷黑漆或粘贴黑色电工胶布等方式增加反差。反光纸的宽度应视转轴直径而定,大直径转轴要宽一些,大约对应角度为3-5度左右。
用软管磁力支架将光电传感器发射管的红光正对反光纸,间隙1~30cm之间。注意观察光电传感器后面的红色发光管(动作指示灯),动作指示灯接收到反射信号时应不停的闪烁。调节光电传感器上白色的灵敏度旋钮,使动作指示灯在不停的闪烁。
调节的步骤:先逆时针调节灵敏度旋钮,使动作指示灯变绿,然后再顺时针调节灵敏度旋钮,使动作指示灯变红并闪烁。仪器上才会有相应稳定转速显示。
4.1.2、使用霍尔传感器时,应先在皮带轮或转子平面上安放好小磁钢,作为零相位标记。用软管磁力支架将霍尔传感器固定,正对着磁钢,间隙大约5-10mm左右。通上电以后,霍尔传感器上指示灯亮。在低速转动时霍尔传感器指示灯在不停的闪烁,面板上光电指示灯也在不停的闪烁。仪器上会有相应的稳定的转速显示。
安放小磁钢注意事项:1.磁钢有正反二面区分。有园圈标记的面朝外,对着霍尔传感器,否则会没有输出。2.为了增加磁钢吸力,防止转子高速运转时因离心力飞出,请用502胶沿磁钢四周滴一圈。3.磁钢安放平面上,如果平面上有孔;有槽;有飞沿安放更安全可靠。
4.2、振动传感器的安装
4.2.1 、振动传感器分加速度传感器和速度传感器二类,加速度传感器适用于高频振动,速度传感器适用于低频振动。速度传感器是无源的,其抗干扰性优于加速度传感器,加速度传感器其频响好,线性好又优于速度传感器。
振动传感器用来拾取设备振动信号。使用时应将磁吸座牢固的吸在待测点上,指支撑转子的轴承座上,并且越靠近轴承座越好。该传感器可在任意角度测量,原则上是测到振动幅度大,数值稳定的方向测量。注意振动传感器一般要安装在垂直于转子轴的水平方向位置进行测量。
4.2.2、 磁吸座是由铝铁硼磁钢和设计磁路构成的安装吸盘,M5螺钉可拧入振动传感器下部螺孔中,这种磁吸座可十分方便地将传感器安装在铁磁材料的设备轴承座上。而对非铁磁材料的设备,用户需要另打孔攻丝进行固定。
4.3、相位角的确定
零相角的定义:从参考标记逆设备转子旋转方向看,从亮到暗的边缘。
光电传感器以贴白色反光纸的位置,作为相位角的零度。霍尔传感器以安放小磁钢的位置,作为相位角的零度。激光传感器以贴反光纸的位置,作为相位角的零度。以转子旋转方向的逆方向数相位角的度数。这点千万不能弄错,否则动平衡计算结果越变越差。
稳定的转速测量,稳定的振动信号测量,正确相位角定义,是动平衡计算结果成败的关键。
在做动平衡的测量过程中,振动传感器和转速传感器安装位置应始终保持不变。
在试重法中如何安装试重块
一般来说,是在反光纸零位处安放试重块,当然也可以在校正平面上任意位置。加试重的大小和位置都是任意的。加试重的目的是引起振动矢量发生变化,以利于以后的平衡计算。安装试重的方法,可以是焊接(重的可以是铁块,轻的可以是焊锡丝)。可以借用校正平面上的孔洞安装螺丝、螺帽、平垫等。设备转子在低速运转时,可以加磁铁,可以加橡皮泥。以及各种夹子之类,也可以捆绑铁条等,所有加试重块前都要先称重。另外加试重块过程中都应该注意安全,试重块在设备运转过程中不能掉下来。
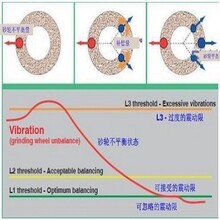
剩余不平衡量的选择标准
1.是否达到剩余不平衡量的要求,对仪器而言具体看三种情况:
①.动平衡过程中经过多次配重达到了仪器规定的不平衡量减少率大于90%的要求。
②.一般认为,当大设备转子振动位移量已经接近10微米,小设备转子的振动位移量已经接近1微米。
③.在动平衡振动测量中,振动的幅值上下变化的幅度超过±30%,振动的相角上下变化超过±30°。动平衡测量就无法继续进行。此时屏幕显示的配重M就是转子的剩余不平衡量。
2.平衡精度等级的合理选用与不平衡量的计算公式