DSQC1000 3HAC042766-001 1
DSQC1024 3HAC058366-001 1
3HAC026813-002 1
3HAC029157-001 2
3HAC044075-001 5
机器人主机是机器人的核心部分,相当于机器人的“大脑”,主要用来控制机器人的运行和动作。
机器人主机的构造因机器人类型和用途的不同而异,但通常包括以下几个主要部分:
1. 控制器:机器人的控制器是其主要的计算部件,用于处理机器人的各种指令和动作。控制器通常由微处理器、内存、输入/输出设备等组成。
2. 传感器:机器人通常配备有多种传感器,用于感知周围环境的信息,如距离、方向、温度、湿度等。这些传感器可以帮助机器人做出更加智能和灵活的反应。
3. 电机和执行器:机器人需要通过电机和执行器来执行各种动作,如移动、抓取、旋转等。电机和执行器的类型和数量也因机器人的类型和用途而异。
4. 电源:机器人需要一个可靠的电源来其正常运行。电源可以是电池、交流电等。
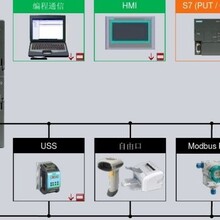
5. 通信接口:机器人还需要与其他设备或系统进行通信,以获取指令或传输数据。通信接口可以是无线的或有线的,如蓝牙、Wi-Fi、以太网等。
6ES7511-1AL03-0AB0 数量1
1756-L82E 1 109172
1756-IA32 1 13865
SK-R1-FAN1-F8 6个 22267
3BHE004573R0143 1
ABB
3HAC17833-2 3
3HAC024692-060 3
5069-L320ER 43216
5069-RTB64-SCREW 385 各1
1492-MCEA115 数量 6
1492-AMCDIN1 数量 6
1489-M2C020 数量 20
3WL1225-4FB36-4AS4-Z R21+S07 1
3WL9111-0AP02-0AA0 1
BSFC-02C 1
SGM7J-04A7L-CM12 1