平台式 AGV
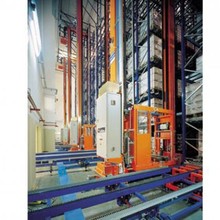
平台式AGV能够实现物品的自动化可靠运输及自动投送。其搭载激光传感器、超声波传感器。基于激光SLAM的定位导航算法,结合超声波传感器,实现自主行走及自主避障。其控制台可以集中调度、监控、管理 AGV 系统的运行状态活动。

双臂机器人双臂机器人采用两个7自由度柔性机械臂组成, 能够集成化与柔性化地实现快速、安全、灵活、、高 效的旋拧、定位等全套装配解决方案。该机器人系统配有视觉系统,具有视觉识别引导抓取功能,末端采用电控夹爪,实现对工件的稳定抓取。
旋转处理模型
旋转处理即以中心点为旋转参考点,旋转修正,如图10a所示。设定P0(x0 ,y0) 为轮廓中心点坐标,B(x23 ,y23)为待修正后矩形一边的中心点坐标, A(x'23,y'23)为修正后矩形一边的中心点坐标。根据P0和B点坐标求得A点坐标,如式(3):