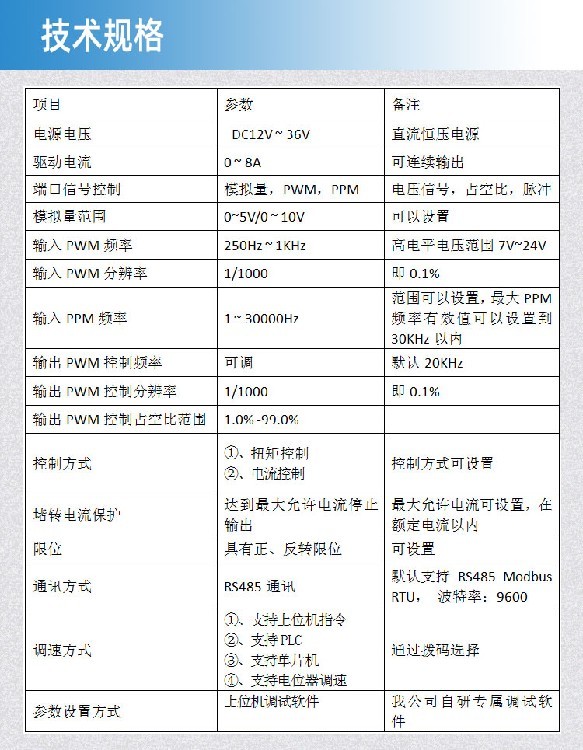
直流有刷电机驱动器(DC brushed motor driver)是一种用于控制和驱动直流有刷电机的电子设备。这些驱动器主要用于需要控制转速和方向的应用,例如机器人、自动化系统、工业设备和消费类电子产品中。 ### 结构和工作原理 直流有刷电机驱动器的基本结构包括以下几个关键部分: 1. **电源输入**:通常是直流电源,其电压和电流规格取决于所驱动电机的要求。 2. **电机接口**:用于连接直流有刷电机的电源线和控制信号线。典型的接口包括电源线(通常是正极和负极),以及控制电机转速和方向的输入信号。 3. **电机驱动电路**:驱动电路可以分为功率驱动部分和控制逻辑部分。 - **功率驱动部分**:负责提供电流以驱动电机的转子,通常通过功率晶体管(MOSFET)或功率BJT(双极型晶体管)来实现。 - **控制逻辑部分**:接收来自控制器(如微控制器或PLC)的输入信号,根据输入信号调整功率驱动部分的输出,控制电机的速度和方向。 4. **保护电路**:为了保护电机和驱动器本身,通常会包括过载保护、过电流保护和过热保护电路。 ### 功能和特性 直流有刷电机驱动器具有以下功能和特性: - **速度控制**:通过调整输入信号的脉宽调制(PWM)或电压来控制电机的转速。 - **方向控制**:通过控制输入信号的极性或使用额外的控制信号线来改变电机的旋转方向。 - **电流调节**:一些驱动器可以监测和调整输出电流,以电机工作在安全和的电流范围内。 - **编码器反馈支持**:对于需要更位置控制的应用,驱动器可以与编码器结合使用,以提供位置反馈。 - **低功耗模式**:一些驱动器支持低功耗待机模式或睡眠模式,以节省能量。 ### 应用领域 直流有刷电机驱动器广泛应用于各种领域,包括但不限于: - **机器人技术**:用于驱动机器人的关节和移动部件。 - **工业自动化**:用于控制输送带、泵和风机等设备。 - **消费类电子产品**:如电动工具、电动玩具和家电。 - **汽车和交通**:在汽车的座椅调节、车窗升降等系统中使用。 - **医疗设备**:例如手术机器人和呼吸机。 ### 选择驱动器的考虑因素 选择适当的直流有刷电机驱动器时,需要考虑以下因素: - **电机规格**:包括电压、电流、额定功率和大功率等。 - **控制要求**:速度范围、精度和响应时间。 - **环境条件**:如温度范围和防护等级。 - **集成需求**:是否需要集成编码器反馈或其他传感器。 - **成本和可靠性**:驱动器的成本、可靠性和维护要求。 综上所述,直流有刷电机驱动器是现代电子控制系统中不可或缺的部分,通过有效地控制电机的转速和方向,实现了许多自动化和电动化应用的核心功能。
电流闭环PID控制器是一种用于控制电流的PID控制器,通过测量电流的实际值与设定值之间的差异,反馈给PID控制器,根据比例、积分和微分三个参数来调整输出电压或电流,使实际电流尽快趋近设定值,实现闭环控制。 在电力系统中,电流闭环PID控制器通常被用于调节电动机、变压器等设备的输出电流,以确保系统稳定性和准确性。其优点包括响应速度快、鲁棒性强、控制精度高等。
点击“从驱动器中读取”按钮,将驱动器当中的当前参数读出来,使得上位机软件与驱动器内部的参数保持一致。然后在按照实际使用情况设置好参数,正确设置。
在该页面当中:
串口波特率:是设置驱动器RS485通讯的波特率
数据位:是设置驱动器RS485通讯的数据位
停止位:是设置驱动器RS485通讯的停止位
校验位:是设置驱动器RS485通讯的校验位
串口属性设置好以后,单击“设置串口”按钮,即可完成设置;
驱动器地址:是设置驱动器的设备地址号
设置好以后,单击“设置驱动器地址”按钮,即可完成设置
可通过拨码开关选择利用RS485指令控制,拨码开关设置请参考1.3;当选择RS485指令控制时,方向控制端口和信号输入端口均无效。当多台控制器通过RS485总线组网时,可以参考图2-7接线方式,此时需要注意在首台和尾台需要各加一个120欧姆的终端电阻。
点击“从驱动器中读取”按钮,将驱动器当中的当前参数读出来,使得上位机软件与驱动器内部的参数保持一致。然后在按照实际使用情况设置好参数,正确设置,设置完成以后,点击“写入驱动器”按钮即可。
在该页面中:
加速时间:即电机从当前转速转到目标转速的缓启时间;
减速时间:即电机从当前转速降到停止的缓停时间;
SV小有效电压:即若驱动器配置模拟量控制时,则IN1端子的电压如果低于该值时,认为是零电压;
SV大有效电压:即若驱动器配置模拟量控制时,则IN1端子的电压如果该值时,认为是已达到上限电压;
PWM输出上限:即输出端输出PWM的上限,该值可以限制输出电压;
PWM输出频率:即输出端输出PWM的频率,默认为20KHz;
PPM电子齿轮比:即选择PPM控制时,用于对输入的脉冲频率进行分频;
输入PPM大频率:即当输入的脉冲频率达到该值时,输出到达大;
输入PPM小频率:即当输入的脉冲频率低于该值时,输出为零;
预置占空比:即当选择预置转速控制模式时,如果选择的是扭矩模式,则开机以后,按照此设置的占空比控制电机转动;
预置电流:即当选择预置转速控制模式时,如果选择的是电流模式,则开机以后,按照此设置的目标电流控制电机;
IN2端子属性:该端子有3中配置方式,分别为
1--输入低电平时正转限位,反转可动;
2--输入高电平时正转限位,反转可动;
3--与IN3端口组合,接倒顺开关;
如果配置为“输入低电平时正转限位,反转可动”时,则当该端口输入
低电平时,正转处于限位状态,电机不可动,但是允许反向转动;该端口
悬空时为高电平。
如果配置为“输入高电平时正转限位,反转可动”时,则当该端口输入
高电平时,正转处于限位状态,电机不可动,但是允许反向转动;
如果配置为“与IN3端口组合,接倒顺开关”时,则当该端口为高电平,
IN3端口为低电平时,电机正转,当该端口为低电平,IN3端口为高电平时,
电机反转,若IN2与IN3端口同时为低电平或者同时为高电平,则电机停止;
该端口默认设置为:“输入低电平时正转限位,反转可动”。