并将其进行处理、分析和存储,生成报告和趋势分析,为焦炉的运行管理提供数据支持。通信系统:与控制中心、监控中心等连接,实现远程控制和数据传输等功能。
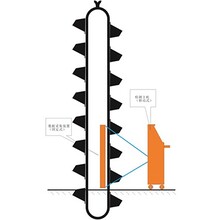
实现机器人在轨道上的运动控制、定位和路径规划等功能,机器人能够准确地行走在焦炉轨道上。焦炉轨道巡检机器人的全自动控制系统包括以下部分:控制中心:设在焦炉运行管理中心,负责控制整个机器人系统的运行,实现机器人的巡检、数据采集、运动控制等功能。
有些煤矿防爆巡检机器人的生产厂家提供了评测报告、客户反馈和性能测试数据等信息,这些可以作为选择机器人的参考。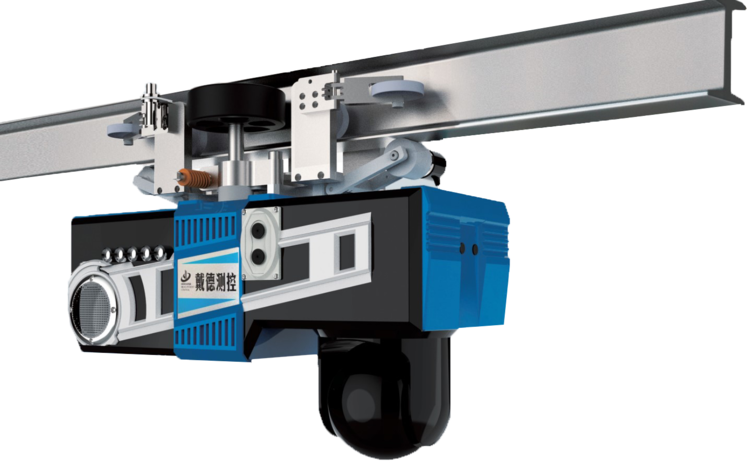
遥控操作模式:机器人可以通过遥控器进行操作,可以对机器人进行远程控制,实现巡检、清洁、维护和紧急处置等工作。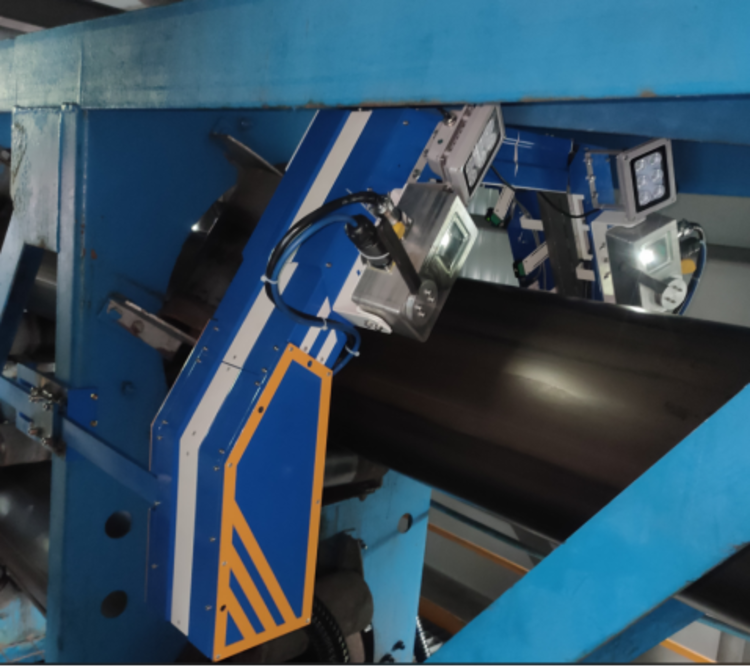
这种模式适用于场地比较复杂、巡检路线比较难以规划、需要及时处理突发事件的化工场所。除了以上两种工作模式外,
提前发现潜在故障,从而降低设备故障率和维修成本。提高安全性:运行在危险和恶劣环境的焦化设备,对人体存在很大的危害,