微型电机和微型电机只有与匹配的运动控制器结合使用才能成为可靠的驱动系统。这就是为什么驱动 ABB(见公司框)提供的 电机系列包括多种运动控制器选择,这些运动控制器设计为不同功率等级,带或不带外壳,适用于各种应用。现在,无外壳运动控制器系列又添新成员:MC3603(图 1),由于其紧凑的尺寸,非常适合集成到设备制造和医疗技术应用中 运动控制器具有 36 V 和 3 A(峰值电流 9 A),覆盖中等功率范围,可达约。100 W。适用于带编码器的“普通”直流电机、无刷驱动器和直线电机。I/O 选项和编码器接口与该产品系列的其他产品相同。USB、RS232、CANopen 和 EtherCAT 可用于通信。运动控制器已经有了新的固件版本“M”。为确保简单方便的系统设置,应使用 FAULHABER 运动管理器的 新更新(6.9 版)。
适用于所有运动控制器的 EMC 兼容设计
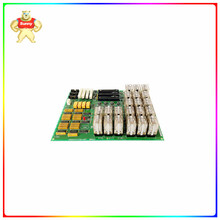
电源供应电路:电源供应电路部分电路是向整个电路板中各个单元电路提供能量的一部分电路,它工作在高电压、大电流的环境下,是容易出故障的一部分电路。
电源供应电路的功用是:将220VAC或380VAC交流电转换成电路板所需的各种不同等级、输出电压恒定的+5V. 12V. 15V. 18V. 24V等级别的直流电。
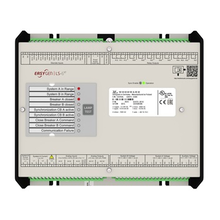
输入接口电路:输入接口电路是电路板和外界进行信息交换和沟通的一部分电路,它可以将人们想要对电路板所说的话或要办的事转化成电路板中微处理器能够识别的电信号。例如:我们在监控温度高低时,你如果用咱们平常人与人交流的语言说给微处理器听,温度高了,请把它调低一一些, 微处理是听不懂咱们说的话的,这时,我们可以通过接口电路先用热敏电阻或热电偶元件将温度信号转成电信号,然后在对所转换出电信号进行处理,就可以得到微处理器可以识别的电信号了。这样的话微处理器明白了我们要它处理的事项后,他就可以按照我们的意图去做了。其它的像光照度、压力、风力、液位、位置、等信号都是同样道理。
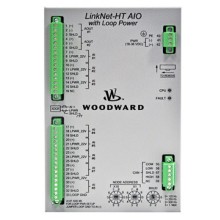
模块一次添加一个到配置中选择参数以应用于模块的所有通道。可以选择逻辑模块来提供HART状态和过程Profibus-DP循环输入电报中的变量。此外,对于需要访问许多HART变量的应用可以使用HART“邮箱”。该技术收集HART变量根据需要;节省电报中的空间数据工作过度。此方法仅在使用时可用参数化。
可重构系统的优点就是能够根据不同的应用需求,改变自身的体系结构,以便与具体的应用需求相匹配。面对市场的千变万化,如何使制造系统快速而经济地响应市场需求的变化,是对当今制造业的一个挑战。传统的机械自动化生产线具有批量生产的效益,但面对市场的变化不能快速响应;而柔性制造系统虽能缩短产品的试制和生产周期,但投资,回收周期长。因此,迫切需要建立一种既具有规模生产的效益,又能快速适应动态多变的制造环境,并能充分利用现有制造资源的新型制造模式。对此,新近提出的可重构制造系统是适应这一需求的一条有效途径。
随着时间的推移,CPU倾向于吸收流行的协处理器的功能。现在,fpu被认为是处理器主流水线不可分割的一部分;SIMD单元加速了多媒体的发展,取代了各种各样的角色死后无子女。加速卡;甚至绘图处理器已经集成在CPU芯片上。尽管如此,在台式机之外,单元仍然很受欢迎,用于额外的功能,并允许立于主处理器产品线的持续发展。
一;一个人工智能加速器是一类的硬件加速器[1]或计算机系统[2][3]旨在加速人工智能和机器学习应用程序,包括人工神经网络和计算机视觉。典型应用包括以下算法机器人学,物联网,以及其他数据-密集型或传感器驱动的任务。[4]他们经常是多核设计,通常侧重于低精度算术,小说数据流架构或者内存计算能力。截至2018年,典型的人工智能集成电路芯片包含数十亿关于金属氧化物半导体场效应晶体管晶体管。[5]此类设备有许多特定于供应商的术语,它是一个新兴技术没有主导设计。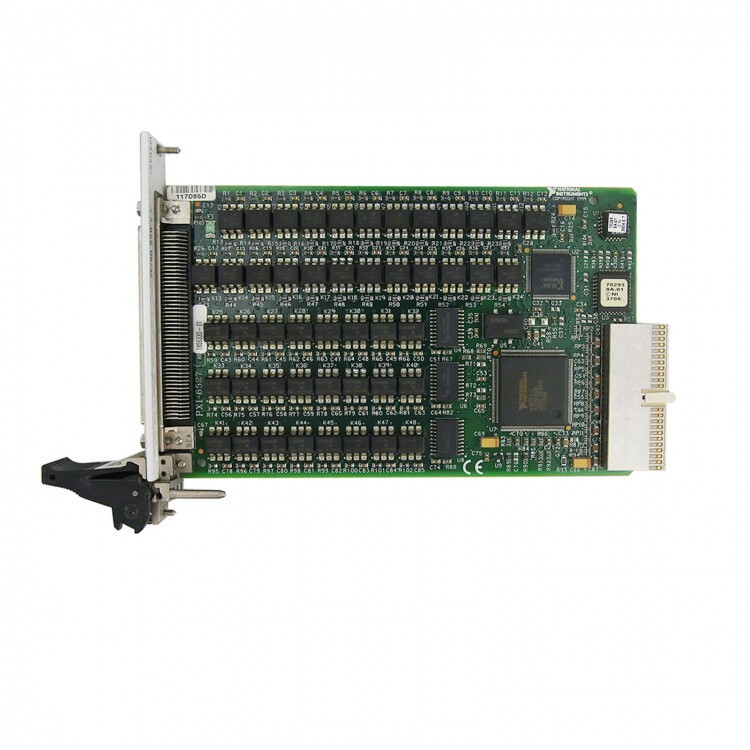
4个动态信号的信号接口卡输入和2个转速表(速度)的输入,为MPC4机械防护卡螺钉端子连接器(48个端子)输入/输出连接包含4个可归属的继电器报警信号,由软件控制32个完全可编程的开路集电极输出(跳线可选)到IRC4和RLC16继电器卡片缓冲“原始”传感器信号和模拟输出振动信号(电压或电流)渠道所有输入和输出的EMI保护实时插卡和拔卡(热插拔)可提供“标准”和“立电路”版本 转换器的程序控制由基本握手序列组成。稳定延迟直接发生在模拟网络(例如选择新的输入信道),并表示网络的稳定时间。结算延迟完成后跟踪保持(T&H)放大器进入跟踪模式跟踪间隔开始。通过支持云的功能增强了其 的 RobotStudio® 机器人编程和仿真软件。新的 RobotStudio Cloud 使个人和团队能够在世界任何地方、使用任何设备就机器人单元设计进行实时协作。自动版本控制新功能提高了团队间的透明度和生产力。该软件简化的界面和直观的导航使所有技能水平的用户都能从事机器人项目。